Exercício Resolvido de Quantidade de Movimento
publicidade
Uma rã de massa m está parada no extremo de uma tábua de massa M e comprimento L. A tábua está flutuando na superfície de um lago. A rã salta formando um ângulo α com a horizontal na direção da tábua. Qual deve ser a velocidade inicial da rã para que depois do salto ela esteja no outro extremo da tábua?
Dados do problema:
- Massa da rã: m ;
- Massa da tábua: M;
- Comprimento da tábua: L;
- Ângulo entre o salto da rã e a tábua: α.
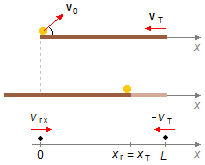
Quando a rã salta para frente pela Conservação da Quantidade de Movimento a tábua se desloca para
trás com velocidade vT. Como a velocidade inicial v0 da rã forma um
ângulo α com a tábua, desprezada a resistência do ar, a trajetória da rã é uma parábola de “boca”
para baixo (Figura 1).
Adotamos um sistema de referência com o eixo-x na direção da tábua e sentido para a direita e eixo-y para cima, a velocidade inicial da rã pode ser decomposta nessas direções
Adotamos um sistema de referência com o eixo-x na direção da tábua e sentido para a direita e eixo-y para cima, a velocidade inicial da rã pode ser decomposta nessas direções
\[
\begin{gather}
v_{rx}=v_{0}\cos \alpha \tag{I-a}\\[10pt]
v_{0ry}=v_{0}\operatorname{sen}\alpha \tag{I-b}
\end{gather}
\]
No salto a rã passa por uma altura máxima hmax, a rã e a extremidade da tábua terminam
o movimento num mesmo ponto xr = xT.

Solução
O movimento da rã ao longo do eixo-x e da extremidade da tábua têm velocidades constantes,
Movimento Retilíneo Uniforme (M.R.U.). O problema se reduz ao movimento de dois corpos, um
com velocidade vrx no sentido da trajetória, partindo da origem
xr0 = 0, e outro com velocidade −vT contra o sentido da
trajetória, partindo de um ponto xT0 = L (Figura 2), a função horária
desse movimento é dada por
\[ \bbox[#99CCFF,10px]
{x=x_{0}+vt}
\]
Para a rã
\[
\begin{gather}
x_{r}=x_{r0}+v_{rx}t\\
x_{r}=0+v_{rx}t\\
x_{r}=v_{rx}t
\end{gather}
\]
substituindo a expressão de (I-a)
\[
\begin{gather}
x_{r}=v_{0}\cos \alpha t \tag{II}
\end{gather}
\]
Para a tábua
\[
\begin{gather}
x_{T}=x_{T0}-v_{T}t\\
x_{T}=L-v_{T}t \tag{III}
\end{gather}
\]
usando a condição de encontro dos corpos, xr = xT, igualando as
expressões (II) e (III)
\[
\begin{gather}
v_{0}\cos \alpha t=L-v_{T}t \tag{IV}
\end{gather}
\]
Aplicando o Princípio da Conservação da Quantidade de Movimento
\[
\begin{gather}
Q_{i}=Q_{f}\\
Q_{r}^{i}+Q_{T}^{i}=Q_{r}^{f}+Q_{T}^{f}\\
mv_{rxi}+Mv_{Ti}=mv_{rxf}+Mv_{Tf}
\end{gather}
\]
Inicialmente a tábua está em repouso, vTi = 0, e a componente da velocidade da rã na
direção da tábua é dada pela primeira das expressões em (I), vrxi = vrx.
No final do salto a rã para na extremidade da tábua, vrxf = 0, e a tábua está se movendo
com velocidade vTf = vT
\[
\begin{gather}
mv_{0}\cos \alpha +M.0=m.0+Mv_{T}\\
mv_{0}\cos \alpha=Mv_{T}\\
v_{T}=\frac{M}{m}v_{0}\cos \alpha \tag{V}
\end{gather}
\]
O intervalo de tempo que a rã leva para dar o salto é o mesmo intervalo que a extremidade da tábua leva para
chegar onde a rã termina o salto, este também é o mesmo intervalo de tempo que a rã leva para subir, atingir
a altura máxima, e descer (Figura 1).Adotando g para a aceleração da gravidade e usando a expressão (I-b) para a componente da velocidade na direção y, o movimento da rã nesta direção está sob a ação da aceleração da gravidade, esta em Movimento Uniformemente Variado (M.U.V.), a função da velocidade nesta direção é dada por
\[ \bbox[#99CCFF,10px]
{v=v_{0}-gt}
\]
\[
\begin{gather}
v_{ry}=v_{0ry}-gt\\
v_{ry}=v_{0}\operatorname{sen}\alpha-gt
\end{gather}
\]
quando a rã atinge a altura máxima a componente da velocidade na direção y se anula,
vry = 0, por um instante, inverte o sinal, e começa a cair, o intervalo de tempo
th para atingir a altura máxima será
\[
\begin{gather}
0=v_{0}\operatorname{sen}\alpha-gt_{h}\\
t_{h}=\frac{v_{0}\operatorname{sen}\alpha}{g}
\end{gather}
\]
o intervalo de tempo para a rã subir e descer será o dobro deste valor
\[
\begin{gather}
t=2\frac{v_{0}\operatorname{sen}\alpha}{g} \tag{VI}
\end{gather}
\]
substituindo as expressões (V) e (VI) na expressão (IV)
\[
\begin{gather}
v_{0}\cos \alpha \left(2\frac{v_{0}\operatorname{sen}\alpha}{g}\right)=L-\frac{M}{m}v_{0}\cos \alpha \left(2\frac{v_{0}\operatorname{sen}\alpha}{g} \right)\\[5pt]
\frac{2v_{0}^{2}\cos \alpha \operatorname{sen}\alpha}{g}=L-\frac{M}{m}\frac{2v_{0}^{2}\cos \alpha \operatorname{sen}\alpha}{g}
\end{gather}
\]
lembrando que
\( \operatorname{sen}2\alpha =2\cos \alpha \operatorname{sen}\alpha \)
e multiplicando toda a expressão por g
\[
\begin{gather}
\qquad \qquad \frac{v_{0}^{2}\operatorname{sen}2\alpha}{g}=L-\frac{m}{M}\frac{v_{0}^{2}\operatorname{sen}2\alpha}{g}\qquad (\times g)\\[5pt]
\frac{v_{0}^{2}\operatorname{sen}2\alpha}{\cancel{g}}\cancel{g}=gL-\frac{m}{M}\frac{v_{0}^{2}\operatorname{sen}2\alpha}{\cancel{g}}\cancel{g}\\[5pt]
v_{0}^{2}\operatorname{sen}2\alpha=gL-\frac{m}{M}v_{0}^{2}\operatorname{sen}2\alpha\\[5pt]
v_{0}^{2}\operatorname{sen}2\alpha+\frac{m}{M}v_{0}^{2}\operatorname{sen}2\alpha=gL\\[5pt]
v_{0}^{2}\operatorname{sen}2\alpha\left(1+\frac{m}{M}\right)=gL\\[5pt]
v_{0}^{2}\operatorname{sen}2\alpha\left(\frac{M+m}{M}\right)=gL\\[5pt]
v_{0}^{2}=\frac{gLM}{\operatorname{sen}2\alpha\left(M+m\right)}
\end{gather}
\]
\[ \bbox[#FFCCCC,10px]
{v_{0}=\sqrt{\frac{gLM}{\operatorname{sen}2\alpha \left(M+m\right)}}}
\]
publicidade

Fisicaexe - Exercícios Resolvidos de Física de Elcio Brandani Mondadori está licenciado com uma Licença Creative Commons - Atribuição-NãoComercial-Compartilha Igual 4.0 Internacional .