Solved Problem on Center of Mass and Linear Momentum
advertisement
A frog of mass m is standing at the end of a board of mass M and length L. The board is floating on the surface of a lake. The frog jumps, making an angle α with the horizontal towards the board. What should be the initial speed of the frog so that after the jump it is at the other end of the board?
Problem Data:
- Mass of frog: m ;
- Mass of board: M;
- Length of board: L;
- Angle between the jump of the frog and the board: α.
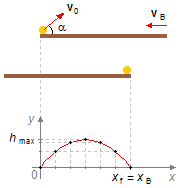
When the frog jumps forward by the Conservation of Momentum the board moves backward at
vT speed. Since the initial velocity v0 of the frog makes an angle
α with the board, neglecting the air resistance, the trajectory of the frog is a parabola with
concavity downward (Figure 1).
We choose a frame of reference with the x-axis in the direction to the right and the y-axis upward, the initial velocity of the frog can be decomposed in these directions
We choose a frame of reference with the x-axis in the direction to the right and the y-axis upward, the initial velocity of the frog can be decomposed in these directions
\[
\begin{gather}
v_{rx}=v_{0}\cos \alpha \tag{I-a}\\[10pt]
v_{0ry}=v_{0}\sin \alpha \tag{I-b}
\end{gather}
\]
In the jump, the frog goes through a maximum height, hmax, the frog and the end of the
board end the motion at the same point xr = xT.
Solution
The motion of the frog along the x-axis and the end of the board have constant speeds. The
problem is reduced to the motion of two bodies, one with speed vrx in the direction of
the reference, starting from the origin xr0 = 0, and another with speed
−vT in the opposite direction of the reference, starting from one point
xT0 = L (Figure 2), the equation of the displacement as a function of
time is given by
\[ \bbox[#99CCFF,10px]
{x=x_{0}+vt}
\]

For the frog
\[
\begin{gather}
x_{r}=x_{r0}+v_{rx}t\\
x_{r}=0+v_{rx}t\\
x_{r}=v_{rx}t
\end{gather}
\]
substituting the expression of (I-a)
\[
\begin{gather}
x_{r}=v_{0}\cos \alpha t \tag{II}
\end{gather}
\]
For the board
\[
\begin{gather}
x_{T}=x_{T0}-v_{T}t\\
x_{T}=L-v_{T}t \tag{III}
\end{gather}
\]
using the condition of the equal position of the bodies, xr = xT,
equating the expressions (II) and (III)
\[
\begin{gather}
v_{0}\cos \alpha t=L-v_{T}t \tag{IV}
\end{gather}
\]
Applying the Principle of Conservation of Momentum
\[
\begin{gather}
Q_{i}=Q_{f}\\
Q_{r}^{i}+Q_{T}^{i}=Q_{r}^{f}+Q_{T}^{f}\\
mv_{rxi}+Mv_{Ti}=mv_{rxf}+Mv_{Tf}
\end{gather}
\]
Initially, the board is at rest, vTi = 0, and the component of the speed of the frog
towards the board is given by the first of the expressions in (I),
vrxi = vrx. At the end of the jump the frog to at the end of the board,
vrxf = 0, and the board is moving with speed vTf = vT
\[
\begin{gather}
mv_{0}\cos \alpha +M.0=m.0+Mv_{T}\\
mv_{0}\cos \alpha=Mv_{T}\\
v_{T}=\frac{M}{m}v_{0}\cos \alpha \tag{V}
\end{gather}
\]
The time interval that the frog takes to make the jump is the same as the end of the board takes to get
where the frog ends the jump, this is also the same time interval as the frog takes to rise, reach the
maximum height h, and descend (Figure 1).Assuming g for the acceleration due to gravity and using the expression (I-B) to the velocity component in the y direction, the motion of the frog in this direction is under the action of gravity, and the equation of speed as a function of time is given by
\[ \bbox[#99CCFF,10px]
{v=v_{0}-gt}
\]
\[
\begin{gather}
v_{ry}=v_{0ry}-gt\\
v_{ry}=v_{0}\sin \alpha-gt
\end{gather}
\]
when the frog reaches the maximum height the component of speed in the direction y is equal to zero,
vry = 0, for an instant, reverses the direction, and begins to fall, the time interval
th to reach the maximum height will be
\[
\begin{gather}
0=v_{0}\sin \alpha-gt_{h}\\
t_{h}=\frac{v_{0}\sin \alpha}{g}
\end{gather}
\]
the time interval for the frog to rise and fall will be double this value
\[
\begin{gather}
t=2\frac{v_{0}\sin \alpha}{g} \tag{VI}
\end{gather}
\]
substituting the expressions (V) and (VI) into expression (IV)
\[
\begin{gather}
v_{0}\cos \alpha \left(2\frac{v_{0}\sin \alpha}{g}\right)=L-\frac{M}{m}v_{0}\cos \alpha \left(2\frac{v_{0}\sin \alpha}{g} \right)\\[5pt]
\frac{2v_{0}^{2}\cos \alpha \sin \alpha}{g}=L-\frac{M}{m}\frac{2v_{0}^{2}\cos \alpha \sin \alpha}{g}
\end{gather}
\]
remembering that
\( \sin 2\alpha =2\cos \alpha \sin \alpha \)
and multiplying the expression by g
\[
\begin{gather}
\qquad \qquad \frac{v_{0}^{2}\sin 2\alpha}{g}=L-\frac{m}{M}\frac{v_{0}^{2}\sin 2\alpha}{g}\qquad (\times g)\\[5pt]
\frac{v_{0}^{2}\sin 2\alpha}{\cancel{g}}\cancel{g}=gL-\frac{m}{M}\frac{v_{0}^{2}\sin 2\alpha}{\cancel{g}}\cancel{g}\\[5pt]
v_{0}^{2}\sin 2\alpha=gL-\frac{m}{M}v_{0}^{2}\sin 2\alpha\\[5pt]
v_{0}^{2}\sin 2\alpha+\frac{m}{M}v_{0}^{2}\sin 2\alpha=gL\\[5pt]
v_{0}^{2}\sin 2\alpha\left(1+\frac{m}{M}\right)=gL\\[5pt]
v_{0}^{2}\sin 2\alpha\left(\frac{M+m}{M}\right)=gL\\[5pt]
v_{0}^{2}=\frac{gLM}{\sin 2\alpha\left(M+m\right)}
\end{gather}
\]
\[ \bbox[#FFCCCC,10px]
{v_{0}=\sqrt{\frac{gLM}{\sin 2\alpha \left(M+m\right)}}}
\]
advertisement

Fisicaexe - Physics Solved Problems by Elcio Brandani Mondadori is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License .