Exercício Resolvido de Ondas
publicidade
Deduza a Equação de Onda que representa uma onda progressiva unidimensional, numa corda de massa M e comprimento L.
Dados do problema:
- Massa da corda: M;
- Comprimento da corda: L.
Consideremos uma corda longa, fixa nas extremidades, por onde se propaga uma onda (Figura 1). Tomemos um segmento de comprimento Δx da corda, como o deslocamento vertical ao longo da direção y é muito pequeno este segmento, medido num arco sobre a corda tem praticamente a mesma extensão que um segmento medido sobre o eixo-x. No destaque da Figura 1 a escala vertical foi exagerada para fins de visualização.
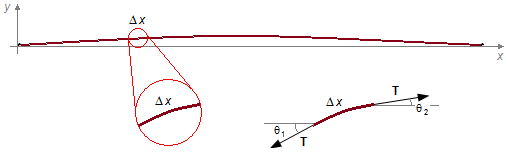
Os extremos desse segmento estão sob a ação das forças de tração T e formam ângulos θ1 e θ2 com a direção horizontal.
Solução
Aplicando a 2.ª Lei de Newton
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\mathbf{F}=m\mathbf{a}} \tag{I}
\end{gather}
\]
Desenhamos as forças de tração que atuam no segmento de corda num sistema de eixos coordenados
(Figura 2). Decompondo as forças de tração nas direções z e y
\[
\begin{gather}
\mathbf{F}={\mathbf{T}}_{1}+{\mathbf{T}}_{2} \tag{II}
\end{gather}
\]
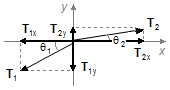
Figura 2
\[
\begin{gather}
{\mathbf{T}}_{1}=T_{1x}\;\mathbf{i}+T_{1y}\;\mathbf{j}=-T_{1}\cos\theta _{1}\;\mathbf{i}-T_{1}\operatorname{sen}\theta_{1}\;\mathbf{j} \tag{III}
\end{gather}
\]
\[
\begin{gather}
{\mathbf{T}}_{2}=T_{2x}\;\mathbf{i}+T_{2y}\;\mathbf{j}=T_{2}\cos\theta _{2}\;\mathbf{i}+T_{2}\operatorname{sen}\theta_{2}\;\mathbf{j} \tag{IV}
\end{gather}
\]
onde i e j são os vetores unitários nas direções x e y, substituindo as
expressões (III) e (IV) na expressão (II)
\[
\begin{gather}
\mathbf{F}=-T_{1}\cos \theta_{1}\;\mathbf{i}-T_{1}\operatorname{sen}\theta_{1}\;\mathbf{j}+T_{2}\cos \theta_{2}\;\mathbf{i}+T_{2}\operatorname{sen}\theta_{2}\;\mathbf{j} \tag{V}
\end{gather}
\]
A aceleração do segmento será
\[
\begin{gather}
\mathbf{a}=a_{x}\;\mathbf{i}+a_{y}\;\mathbf{j} \tag{VI}
\end{gather}
\]
substituindo as expressões (V) e (VI) na expressão (I)
\[
\begin{gather}
-T_{1}\cos \theta_{1}\;\mathbf{i}-T_{1}\operatorname{sen}\theta_{1}\;\mathbf{j}+T_{2}\cos \theta_{2}\;\mathbf{i}+T_{2}\operatorname{sen}\theta_{2}\;\mathbf{j}=m(a_{x}\;\mathbf{i}+a_{y}\;\mathbf{j}\;)
\end{gather}
\]
Separando as componentes
- Direção i
\[
\begin{gather}
T_{2}\cos \theta_{2}-T_{1}\cos \theta_{1}=ma_{x}
\end{gather}
\]
na direção x não há movimento, as duas forças se equilibram e a aceleração é nula,
ax = 0
\[
\begin{gather}
T_{2}\cos \theta_{2}-T_{1}\cos \theta_{1}=0\\[5pt]
T_{2}\cos\theta_{2}=T_{1}\cos \theta_{1}
\end{gather}
\]
- Direção j
\[
\begin{gather}
T_{2}\operatorname{sen}\theta_{2}-T_{1}\operatorname{sen}\theta_{1}=ma_{y}
\end{gather}
\]
fazendo T1 = T2 = T e escrevendo
\( a_{y}=\frac{\partial ^{2}y}{\partial t^{2}} \),
(foi usada derivada parcial, pois a aceleração depende de duas variáveis, x e y, no
caso a componente em x é nula.)
\[
\begin{gather}
T(\operatorname{sen}\theta_{2}-\operatorname{sen}\theta_{1})=m\frac{\partial ^{2}y}{\partial t^{2}}
\end{gather}
\]
como o deslocamento vertical da corda é pequeno em relação ao seu comprimento os ângulos
θ1 e θ2 são pequenos (Figura 1), assim podemos fazer a
aproximação
\( \operatorname{sen}\theta \simeq \operatorname{tg}\theta \) .
Observação: Para ângulos pequenos o valor do seno e da tangente são aproximadamente
iguais, e.g., para um ângulo
\( \theta =5°=\frac{\pi }{36}\;\text{rad} \),
temos
\( \operatorname{sen}\theta =0.08715574274 \)
e
\( \operatorname{tg}\theta =0.08748866352 \)
Observação: e.g. é a abreviação da expressão em latim “exempli gratia” que significa “por exemplo”.
Observação: e.g. é a abreviação da expressão em latim “exempli gratia” que significa “por exemplo”.
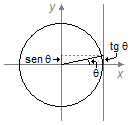
Figura 3
\[
\begin{gather}
T(\operatorname{tg}\theta_{2}-\operatorname{tg}\theta_{1})=m\frac{\partial ^{2}y}{\partial t^{2}} \tag{VII}
\end{gather}
\]
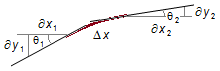
Lembrando que, a tangente é a inclinação da reta nos pontos dos extremos do segmento considerado
(Figura 4), então para variações infinitesimais podemos escrever
\[
\begin{gather}
\operatorname{tg}\theta_{1}=\frac{\partial y_{1}}{\partial x_{1}} \tag{VIII-a}
\end{gather}
\]
\[
\begin{gather}
\operatorname{tg}\theta_{2}=\frac{\partial y_{2}}{\partial x_{2}} \tag{VIII-b}
\end{gather}
\]
substituindo as expressões (VIII-a) e (VIII-b) na expressão (VII)
\[
\begin{gather}
T\left(\frac{\partial y_{2}}{\partial x_{2}}-\frac{\partial y_{1}}{\partial x_{1}}\right)=m\frac{\partial ^{2}y}{\partial t^{2}} \tag{IX}
\end{gather}
\]
A massa m do segmento Δx pode ser escrita a partir da expressão para densidade linear
de massa μ
\[
\begin{gather}
\mu =\frac{m}{\Delta x}\\[5pt]
m=\mu \Delta x \tag{X}
\end{gather}
\]
substituindo a expressão (X) na expressão (IX)
\[
\begin{gather}
T\left(\frac{\partial y_{2}}{\partial x_{2}}-\frac{\partial y_{1}}{\partial x_{1}}\right)=\mu \Delta x\frac{\partial ^{2}y}{\partial t^{2}}\\[5pt]
\frac{\mu }{T}\frac{\partial^{2}y}{\partial t^{2}}=\frac{\dfrac{\partial y_{2}}{\partial x_{2}}-\dfrac{\partial y_{1}}{\partial x_{1}}}{\Delta x}
\end{gather}
\]
passando o lado direito da igualdade para o limite e fazendo Δx tendendo a zero
\[
\begin{gather}
\underset{\Delta x\rightarrow 0}{\lim }{\frac{\dfrac{\partial y_{2}}{\partial x_{2}}-\dfrac{\partial y_{1}}{\partial x_{1}}}{\Delta x}}
\end{gather}
\]
este limite representa a derivada segunda
\( \left(\dfrac{\partial ^{2}y}{\partial x^{2}}\right) \)
de uma função y em relação à x
\[
\begin{gather}
\frac{\mu}{T}\frac{\partial ^{2}y}{\partial t^{2}}=\frac{\partial^{2}y}{\partial x^{2}} \tag{XI}
\end{gather}
\]
A função y(x, t) de uma onda é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{y(x,t)=A\cos (kx-\omega t)} \tag{XII}
\end{gather}
\]
onde A é a amplitude da onda, k é o número de onda e ω é a frequência angular,
para determinar a relação
\( \frac{\mu}{T} \)
derivamos duas vezes a expressão (XII), em relação a posição x em relação ao tempo t.
Derivada parcial em relação a x de \( y(x,t)=A\cos (kx-\omega t) \)
neste caso o tempo t é constante e a função y(x, t) é uma função composta, usando a Regra da Cadeia
neste caso o tempo t é constante e a função y(x, t) é uma função composta, usando a Regra da Cadeia
\[
\begin{gather}
\frac{\partial y[v(x)]}{\partial x}=\frac{dy}{dv}\frac{dv}{dx}
\end{gather}
\]
com
\( y(v)=A\cos v \)
e
\( v(x)=kx-\omega t \)
\[
\begin{array}{l}
\dfrac{dy}{dv}=-A\operatorname{sen}v=-A\operatorname{sen}(kx-\omega t) \\[5pt]
\dfrac{dv}{dx}=k
\end{array}
\]
\[
\begin{gather}
\frac{\partial y}{\partial x}=-Ak\operatorname{sen}(kx-\omega t)
\end{gather}
\]
derivando uma segunda vez em relação a x, usando novamente a regra da cadeia
\[
\begin{gather}
\frac{\partial ^{2}y[v(x)]}{\partial x^{2}}=\frac{dy}{dv}\frac{dv}{dx}
\end{gather}
\]
com
\( y(v)=-Ak\operatorname{sen}v \)
e
\( v(x)=kx-\omega t \),
assim as derivadas serão
\[
\begin{array}{l}
\dfrac{dy}{dv}=-Ak\cos v=-Ak\cos (kx-\omega t) \\[5pt]
\dfrac{dv}{dx}=k
\end{array}
\]
\[
\begin{gather}
\frac{\partial ^{2}y}{\partial x^{2}}=-A k^{2}\cos (kx-\omega t)
\end{gather}
\]
Derivada parcial em relação a t de \( y(x,t)=A \cos (kx-\omega t) \)
neste caso o deslocamento x é constante e a função y(x, t) é uma função composta, usando a Regra da Cadeia
neste caso o deslocamento x é constante e a função y(x, t) é uma função composta, usando a Regra da Cadeia
\[
\begin{gather}
\frac{\partial y[v(t)]}{\partial t}=\frac{dy}{dv}\frac{dv}{dt}
\end{gather}
\]
com
\( y(v)=A\cos v \)
e
\( v(t)=kx-\omega t \),
assim as derivadas serão
\[
\begin{array}{l}
\dfrac{dy}{dv}=-A\operatorname{sen}v=-A\operatorname{sen}(kx-\omega t)\\[5pt]
\dfrac{dv}{dt}=\omega
\end{array}
\]
\[
\begin{gather}
\frac{\partial y}{\partial t}=-A\omega \operatorname{sen}(kx-\omega t)
\end{gather}
\]
derivando uma segunda vez em relação a t, usando novamente a regra da cadeia
\[
\begin{gather}
\frac{\partial ^{2}y[v(t)]}{\partial t^{2}}=\frac{dy}{dv}\frac{dv}{dt}
\end{gather}
\]
com
\( y(v)=-A\omega \operatorname{sen}v \)
e
\( v(t)=kx-\omega t \),
assim as derivadas serão
\[
\begin{array}{l}
\dfrac{dy}{dv}=-A\omega \cos v=-A\omega \cos (kx-\omega t)\\[5pt]
\dfrac{dv}{dt}=\omega
\end{array}
\]
\[
\begin{gather}
\frac{\partial ^{2}y}{\partial t^{2}}=-A\omega ^{2}\cos (kx-\omega t)
\end{gather}
\]
Substituindo estas derivadas na expressão (XI)
\[
\begin{gather}
-{\frac{\mu}{T}}\cancel{A}\omega ^{2}\cancel{\cos (kx-\omega t)}=\cancel{A}k^{2}\cancel{\cos (kx-\omega t)}\\[5pt]
\frac{\mu }{T}\omega^{2}=k^{2}\\[5pt]
\frac{\mu }{T}=\frac{k^{2}}{\omega^{2}}=\left(\frac{k}{\omega}\right)^{2}
\end{gather}
\]
A velocidade de uma onda em função do número de onda e da frequência angular é dada por
\[
\begin{gather}
v=\frac{\omega }{k}\\[5pt]
\frac{1}{v}=\frac{k}{\omega}\\[5pt]
\left(\frac{k}{\omega}\right)^{2}=\frac{1}{v^{2}} \tag{XIII}
\end{gather}
\]
substituindo a expressão (XIII) na expressão (XI)
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\frac{\partial ^{2}y}{\partial x^{2}}=\frac{1}{v^{2}}\frac{\partial^{2}y}{\partial t^{2}}}
\end{gather}
\]
publicidade

Fisicaexe - Exercícios Resolvidos de Física de Elcio Brandani Mondadori está licenciado com uma Licença Creative Commons - Atribuição-NãoComercial-Compartilha Igual 4.0 Internacional .