Exercício Resolvido de Momento de Inércia
publicidade
Demonstre o Teorema dos Eixos Paralelos.
Esquema do problema:
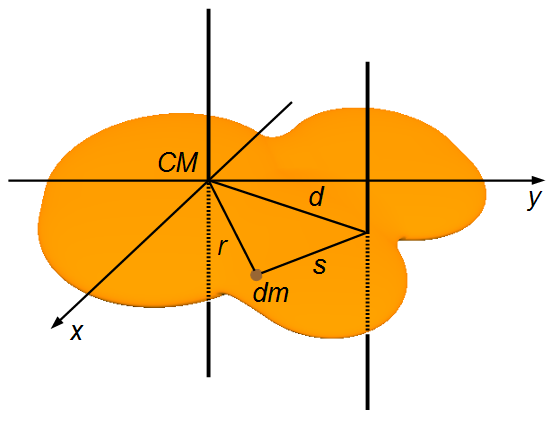
Na Figura 1, dm é um elemento de massa do corpo, r é a distância do elemento de massa até o
eixo perpendicular ao centro de massa do corpo, s é a distância do elemento de massa até um eixo
paralelo ao eixo que passa pelo centro de massa e d é a distância entre os dois eixos.
Solução
Na Figura 2 temos uma vista superior do corpo, o eixo do centro de massa e o eixo paralelo são
perpendiculares à tela. Na figura x e y localizam o elemento de massa dm em relação
ao centro de massa e xp e yp localizam o eixo paralelo em relação ao
centro de massa.
O momento de inércia em relação ao eixo que passa pelo centro de massa é dado por
O momento de inércia em relação ao eixo que passa pelo centro de massa é dado por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{I_{CM}=\int r^{2}\;dm} \tag{I}
\end{gather}
\]
da Figura 2, usando o Teorema de Pitágoras
\[
\begin{gather}
r^{2}=x^{2}+y^{2} \tag{II}
\end{gather}
\]
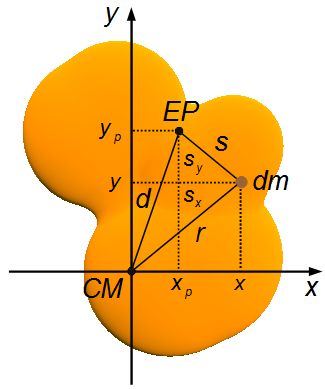
Figura 2
substituindo a expressão (II) na expressão (I)
\[
\begin{gather}
I_{CM}=\int \left(x^{2}+y^{2}\right)\;dm \tag{III}
\end{gather}
\]
O momento de inércia em relação a um eixo paralelo ao eixo que passa pelo centro de massa é dado por
\[
\begin{gather}
I=\int s^{2}\;dm \tag{IV}
\end{gather}
\]
da Figura 2 podemos escrever sx e sy
\[
\begin{gather}
s_{x}=x-x_{p} \tag{V-a}
\end{gather}
\]
\[
\begin{gather}
s_{y}=y_{p}-y \tag{V-b}
\end{gather}
\]
usando o Teorema de Pitágoras
\[
\begin{gather}
s^{2}=s_{x}^{2}+s_{y}^{2}\\
s^{2}=(x-x_{p})^{2}+(y_{p}-y)^{2} \tag{VI}
\end{gather}
\]
substituindo a expressão (VI) na expressão (IV)
\[
I=\int \left[(x-x_{p})^{2}+(y_{p}-y)^{2}\right]\;dm
\]
Desenvolvendo o integrando pelo Produto Notável
\( (a-b)^{2}=a^{2}-2 ab+b^{2} \)
\[
\begin{gather}
I=\int\left[x^{2}-2 xx_{p}+x_{p}^{2}+y_{p}^{2}-2 yy_{p}+y^{2}\right]\;dm\\
I=\int\left[\left(x^{2}+y^{2}\right)-2 xx_{p}-2 yy_{p}+\left(x_{p}^{2}+y_{p}^{2}\right)\right]\;dm
\end{gather}
\]
a integral da soma de funções é igual soma das integrais
\[
I=\int \left(x^{2}+y^{2}\right)\;dm-\int2 xx_{p}\;dm-\int 2 yy_{p}\;dm+\int\left(x_{p}^{2}+y_{p}^{2}\right)\;dm
\]
A primeira integral representa o momento de inércia em relação ao eixo que passa pelo centro de massa dada
pela expressão (III). Na segunda e terceira integrais os termos 2xp e
2yp são constantes e na quarta integral
xp2+yp2 é constante, representa a distância entre
os eixos, colocando esses termos para fora das integrais
\[
\begin{gather}
I=I_{CM}-2x_{p}\int x\;dm-2y_{p}\int y\;dm+\left(x_{p}^{2}+y_{p}^{2}\right)\int \;dm \tag{VII}
\end{gather}
\]
Nas integrais
\( \int x\;dm=0 \)
e
\( \int y\;dm=0 \),
todos os elementos de massa multiplicados pela distância e somados são iguais a zero em relação ao
centro de massa do corpo.
Observação:
\( \int r\;dm=0 \):

Figura 3

Figura 4
As distâncias das massas ao Centro de massa são diferentes (rm > rM), mas as massas também são diferentes (m < M), isto faz com que os produtos rmm e rMM sejam iguais e somem zero.
Um outro sistema formado por três massas diferentes com valores m1, m2 e m3 e colocadas à distâncias r1 r2 e r3 do centro de massa do sistema. Adotamos um sistema de referência fixo no centro de massa. Decompondo os vetores posição na direções x e y, e calculando o produto das massas pela distância ao centro de massa ao longo das direções x e y e somando os resultados (Figuras 5-A e 5-B)
 Figura 5
Figura 5
As distâncias das massas ao centro de massa são diferentes, mas as massas também são diferentes, isto faz com que os produtos rimi nas direções x e y sejam iguais e somem zero.
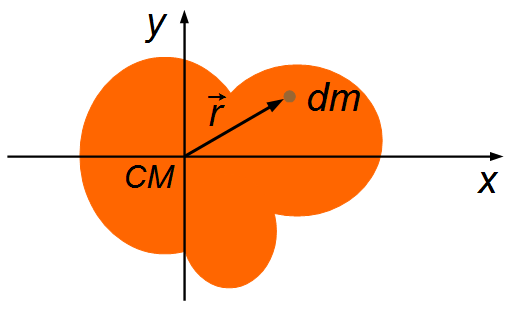
Figura 6
Temos um sistema formado por duas massas iguais a m e colocadas a mesma distância r do
centro de massa do sistema. Adotamos um sistema de referência fixo no centro de massa.
Calculando o produto das massas pela distância ao centro de massa e somando os resultados
(Figura 3)
Figura 3
\[
\sum_{i}r_{i}m_{1}=rm+(-r)m=rm-rm=0
\]
Temos um outro sistema formado por duas massas diferentes com valores m e M e colocadas
à distâncias rm e rM do centro de massa do sistema.
Adotamos um sistema de referência fixo no centro de massa. Calculando o produto das massas pela
distância ao centro de massa e somando os resultados (Figura 4)
Figura 4
\[
\sum_{i}r_{i}m_{1}=r_{m}m+(-r_{M})M=r_{m}m-r_{M}M=0
\]
As distâncias das massas ao Centro de massa são diferentes (rm > rM), mas as massas também são diferentes (m < M), isto faz com que os produtos rmm e rMM sejam iguais e somem zero.
Um outro sistema formado por três massas diferentes com valores m1, m2 e m3 e colocadas à distâncias r1 r2 e r3 do centro de massa do sistema. Adotamos um sistema de referência fixo no centro de massa. Decompondo os vetores posição na direções x e y, e calculando o produto das massas pela distância ao centro de massa ao longo das direções x e y e somando os resultados (Figuras 5-A e 5-B)
\[
\begin{split}
\sum_{i}r_{xi}m_{i} &=-r_{1x}m_{1}+(-r_{2x})m_{2}+r_{3x}m_{3}=\\
&=-r_{1x}m_{1}-r_{2x}m_{2}+r_{3x}m_{3}=0
\end{split}
\]
\[
\begin{split}
\sum_{i}r_{yi}m_{i} &=r_{1y}m_{1}+(-r_{2y})m_{2}+0.m_{3}=\\
&=r_{1y}m_{1}-r_{2y}m_{2}+0=0
\end{split}
\]
As distâncias das massas ao centro de massa são diferentes, mas as massas também são diferentes, isto faz com que os produtos rimi nas direções x e y sejam iguais e somem zero.
Para um corpo rígido de massa M, consideramos um elemento de massa dm dado pelo vetor
posição r em relação ao centro de massa do sistema. Adotamos um sistema de referência
fixo no centro de massa. Como temos uma distribuição de massa contínua passamos da somatória
para a integral. A integração sobre todos os elementos de massa será igual a zero (Figura 6)
\[
\int r\;dm=0
\]
Figura 6
A integral \( \int_{0}^{M}dm=M \), representa a massa total do corpo. Na Figura 2 usando o Teorema de Pitágoras
\[
\begin{gather}
d^{2}=x_{p}^{2}+y_{p}^{2} \tag{VIII}
\end{gather}
\]
Substituindo a expressão (VIII) na expressão (VII) o momento de inércia do corpo em relação a um eixo
paralelo ao eixo que passa pelo centro de massa será
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{I=I_{CM}+Md^{2}} \tag{Q.E.D.}
\end{gather}
\]
Observação: Q.E.D é a abreviação da expressão em latim Quod Erat Demonstrandum que
significa Como Queríamos Demonstrar.
publicidade

Fisicaexe - Exercícios Resolvidos de Física de Elcio Brandani Mondadori está licenciado com uma Licença Creative Commons - Atribuição-NãoComercial-Compartilha Igual 4.0 Internacional .