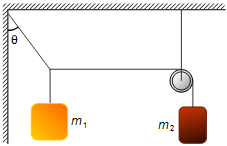
No sistema da figura são conhecidas as massas m1 e m2. Calcule o
ângulo θ e as tensões nas cordas para que o sistema permaneça em equilíbrio. Despreze a massa da
roldana e os atritos.
Dados do problema:
- Massa do bloco 1: m1;
- Massa do bloco 2: m2.
Esquema do problema:
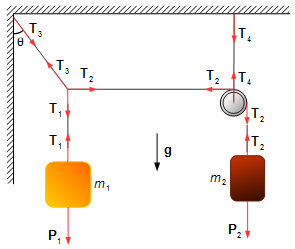
Isolamos os corpos e pesquisamos as forças em cada um deles.
Adotamos um sistema de referência com o vetor unitário j com sentido positivo para baixo.
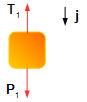
Bloco 1:
- P1: força peso do bloco 1;
- T1: tração da corda.
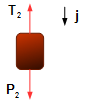
Bloco 2:
- P2: força peso do bloco 2;
- T2: tração da corda.
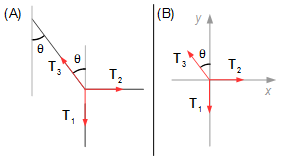
Ponto de contato das trações T1, T2 e T4:
- T1: tração na corda devido ao bloco 1;
- T2: tração na corda devido ao bloco 2;
- T3: tração na corda devido à fixação na parede.
A corda forma um ângulo θ com a parede, traçando uma linha vertical que passa pelo ponto de encontro
dos três vetores, o ângulo entre o vetor T3 e a vertical também será θ, são ângulos
alternos internos (Figura 4).
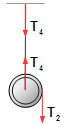
Polia:
- T4: tração na corda que fixa a polia no teto.
Como a polia não tem massa ela não possui peso, sua função é alterar a direção da tração
T2
e transferir essa tração para a tração
T4 que atua no teto.
Solução:
Para que o sistema permaneça em equilíbrio temos a condição de que a somatória das forças que atuam sobre ele é zero
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\sum \mathbf F=0}
\end{gather}
\]
Bloco 1:
\[
\begin{gather}
\mathbf P_1+\mathbf T_1=0
\end{gather}
\]
onde
\( \mathbf T_1=-T_1\;\mathbf j \)
\( \mathbf P_1=m_1g\;\mathbf j \)
\[
\begin{gather}
m_1g\;\mathbf j-T_1\;\mathbf j=0
\end{gather}
\]
Só existem componentes na direção j
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{T_1=m_1g}
\end{gather}
\]
Bloco 2:
\[
\begin{gather}
\mathbf P_2+\mathbf T_2=0
\end{gather}
\]
onde
\( \mathbf T_2=-T_2\;\mathbf j \)
\( \mathbf P_2=m_2g\;\mathbf j \)
\[
\begin{gather}
m_2g\;\mathbf j-T_2\;\mathbf j=0
\end{gather}
\]
Só existem componentes na direção j
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{T_2=m_2g}
\end{gather}
\]
Ponto de contato das trações T1, T2 e T3:
\[
\begin{gather}
\mathbf T_1+\mathbf T_2+\mathbf T_3=0
\end{gather}
\]
onde i e j são o vetores unitários nas direções x e y
\( \mathbf T_1=-m_1g\;\mathbf j \)
\( \mathbf T_2=m_2g\;\mathbf i \)
\( \mathbf T_3=-T_3\operatorname{sen}\theta\;\mathbf i+T_3\cos\theta\;\mathbf j \)
\[
\begin{gather}
-m_1g\;\mathbf j+m_2g\;\mathbf i-T_3\operatorname{sen}\theta\;\mathbf i+T_3\cos\theta\;\mathbf j=0
\end{gather}
\]
Separando as componentes
\[
\begin{gather}
\left\{
\begin{matrix}
\begin{aligned}
m_2g-T_3\operatorname{sen}\theta=0 \\
-m_1g+T_3\cos\theta=0
\end{aligned}
\end{matrix}\right. \\[10pt]
\left\{
\begin{matrix}
T_3\operatorname{sen}\theta=m_2g \\
T_3\cos\theta=m_1g
\end{matrix}\right.
\end{gather}
\]
dividindo a primeira equação pela segunda
\[
\begin{gather}
\frac{T_3\operatorname{sen}\theta}{T_3\cos\theta}=\frac{m_2g}{m_1g} \\[5pt]
\frac{\operatorname{sen}\theta}{\cos\theta}=\frac{m_2}{m_1} \\[5pt]
\operatorname{tg}\theta=\frac{m_2}{m_1}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\theta=\operatorname{arctg}\left(\frac{m_2}{m_1}\right)}
\end{gather}
\]
Para encontrarmos T3 substituímos esse ângulo na primeira equação do sistema
\[
\begin{gather}
T_3\operatorname{sen}\left[\operatorname{arctg}\left(\frac{m_2}{m_1}\right)\right]=m_2g
\end{gather}
\]
Das relações trigonométricas
\[
\operatorname{sen}\left(\operatorname{arctg}x\right)=\frac{x}{\sqrt{x^2+1}}
\]
\[
\begin{gather}
T_3\left(\frac{\dfrac{m_2}{m_1}}{\sqrt{\left(\dfrac{m_2}{m_1}\right)^2+1}}\right)=m_2g \\[5pt]
T_3\frac{m_2}{m_1\sqrt{\left(\dfrac{m_2}{m_1}\right)^2+1}}=m_2g
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{T_3=m_1g\sqrt{\left(\frac{m_2}{m_1}\right)^2+1}}
\end{gather}
\]
Polia:
Como a polia não possui massa e atrito ela apenas transfere as trações aplicadas nas cordas. A tração
T2, devido ao bloco 2, é transferida para o ponto de encontro das trações
T1 e
T3 (Figura 1), e da polia para o teto (Figura 5)
\[
\begin{gather}
T_4=T_2
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{T_4=m_2g}
\end{gather}
\]
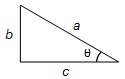
Observação: A relação trigonométrica
\( \operatorname{sen}\left(\operatorname{arctg}x\right)=\frac{x}{\sqrt{x^2+1}} \)
é obtida tomando-se um triângulo retângulo de hipotenusa
a e catetos
b e
c
com ângulo θ (Figura 6).
\[
\begin{gather}
\operatorname{tg}\theta=\frac{b}{c} \tag{I}
\end{gather}
\]
\[
\begin{gather}
\operatorname{tg}\theta=\operatorname{tg}\left(\operatorname{arctg}x\right)=x=\frac{x}{1} \tag{II}
\end{gather}
\]
igualando as expressões (I) e (II)
\[
\begin{gather}
\frac{b}{c}=\frac{x}{1}
\end{gather}
\]
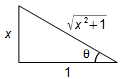
assim determinamos os catetos
b e
c
\[
\begin{gather}
b=x \\[10pt]
c=1
\end{gather}
\]
A hipotenusa é encontrada usando o
Teorema de Pitágoras
\[
\begin{gather}
a^2=b^2+c^2 \\[5pt]
a^2=x^2+1^2 \\[5pt]
a=\sqrt{x^2+1^2\;}
\end{gather}
\]
O seno do ângulo θ será
\[
\begin{gather}
\operatorname{sen}\theta=\frac{x}{\sqrt{x^2+1\;}}
\end{gather}
\]
Da expressão (II)
\[
\begin{gather}
\theta=\operatorname{arctg}x
\end{gather}
\]
Portanto
\[
\begin{gather}
\operatorname{sen}\left(\operatorname{arctg}x\right)=\frac{x}{\sqrt{x^2+1}}
\end{gather}
\]