Uma casca hemisférica de raio a está carregada uniformemente com uma carga Q. Calcule o
vetor campo elétrico num ponto P no centro da base do hemisfério.
Dados do problema:
- Raio da casca hemisférica: a;
- Carga da casca hemisférica: Q.
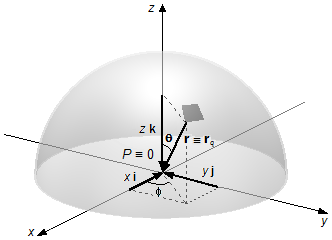
Esquema do problema:
O vetor posição r vai de um elemento de carga do aro dq até o ponto P onde se deseja
calcular o campo elétrico, o vetor rq localiza o elemento de carga em relação à
origem do referencial e o vetor rp localiza o ponto P (Figura 1).
\[
\begin{gather}
\mathbf r=\mathbf r_p-\mathbf r_q
\end{gather}
\]
Pela geometria do problema devemos escolher coordenadas esféricas, o ponto P está origem e sua
distância é nula
\( \mathbf r_p=\mathbf{0} \),
e o vetor rq coincide com o vetor r é escrito como
\( \mathbf r_q=x\;\mathbf i+y\;\mathbf j+z\;\mathbf k \),
então o vetor posição será
\[
\begin{gather}
\mathbf r=\mathbf{0}-(x\;\mathbf i+y\;\mathbf j+z\;\mathbf k) \\[5pt]
\mathbf r=-x\;\mathbf i-y\;\mathbf j-z\;\mathbf k \tag{I}
\end{gather}
\]
Da equação (I) o módulo do vetor posição r será
\[
\begin{gather}
r^2=(-x)^2+(-y)^2+(-z)^2 \\[5pt]
r=\left(x^2+y^2+z^2\right)^{\frac{1}{2}} \tag{II}
\end{gather}
\]
onde x, y e z, em coordenadas esféricas, são dados por
\[
\left\{
\begin{array}{l}
x=a\operatorname{sen}\theta\cos\phi \\[5pt]
y=a\operatorname{sen}\theta\operatorname{sen}\phi \\[5pt]
z=a\cos\theta
\end{array}
\right. \tag{III}
\]
Solução:
O vetor campo elétrico é dado por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\mathbf E=\frac{1}{4\pi\epsilon_0}\int{\frac{dq}{r^2}\;\frac{\mathbf r}{r}}}
\end{gather}
\]
\[
\begin{gather}
\mathbf E=\frac{1}{4\pi\epsilon_0}\int{\frac{dq}{r^{3}}\;\mathbf r} \tag{IV}
\end{gather}
\]
Da equação da densidade superficial de carga (σ) obtemos o elemento de carga dq
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\sigma=\frac{dq}{dA}}
\end{gather}
\]
\[
\begin{gather}
dq=\sigma\;dA \tag{V}
\end{gather}
\]
onde dA é um elemento de área da esfera.
Para obter o elemento de área em coordenadas esféricas calculamos o Jacobiano dado pelo determinante
\[
\begin{gather}
J=\left|
\begin{matrix}
\;\dfrac{\partial x}{\partial r}&\dfrac{\partial x}{\partial \theta}&\dfrac{\partial x}{\partial \phi}\;\\
\;\dfrac{\partial y}{\partial r}&\dfrac{\partial y}{\partial \theta}&\dfrac{\partial y}{\partial \phi}\;\\
\;\dfrac{\partial z}{\partial r}&\dfrac{\partial z}{\partial \theta}&\dfrac{\partial z}{\partial \phi}\;
\end{matrix}\right|
\end{gather}
\]
Cálculo das derivadas parciais das funções
x,
y e
z dadas em (III)
\( x=r\operatorname{sen}\theta\cos\phi \):
\( \dfrac{\partial x}{\partial r}=\dfrac{\partial (r\operatorname{sen}\theta\cos\phi)}{\partial r}=\operatorname{sen}\theta\cos\phi\dfrac{\partial r}{\partial r}=\operatorname{sen}\theta\cos\phi\times 1=\operatorname{sen}\theta\cos\phi \text{, }\)
\[ \dfrac{\partial x}{\partial r}=\dfrac{\partial (r\operatorname{sen}\theta\cos\phi)}{\partial r}=\operatorname{sen}\theta\cos\phi\dfrac{\partial r}{\partial r}=\operatorname{sen}\theta\cos\phi\times 1=\operatorname{sen}\theta\cos\phi \]
na derivada em
r os valores de θ e ϕ são constantes, o seno e
cosseno saem da derivada.
\( \dfrac{\partial x}{\partial \theta}=\dfrac{\partial(r\operatorname{sen}\theta\cos\phi)}{\partial \theta}=r\cos\phi\dfrac{\partial (\operatorname{sen}\theta\;)}{\partial \theta}=r\cos\theta\cos\phi \text{, } \)
\[ \dfrac{\partial x}{\partial \theta}=\dfrac{\partial(r\operatorname{sen}\theta\cos\phi)}{\partial \theta}=r\cos\phi\dfrac{\partial (\operatorname{sen}\theta\;)}{\partial \theta}=r\cos\theta\cos\phi \]
na derivada em θ os valores de
r e ϕ são constantes e o termo em
r e o seno saem da derivada.
\( \dfrac{\partial x}{\partial \phi }=\dfrac{\partial(r\operatorname{sen}\theta\cos\phi)}{\partial \phi}=r\operatorname{sen}\theta\dfrac{\partial (\cos\phi)}{\partial \phi}=r\operatorname{sen}\theta(-\operatorname{sen}\phi)=-r\operatorname{sen}\theta\operatorname{sen}\phi \text{, } \)
\[ \dfrac{\partial x}{\partial \phi }=\dfrac{\partial(r\operatorname{sen}\theta\cos\phi)}{\partial \phi}=r\operatorname{sen}\theta\dfrac{\partial (\cos\phi)}{\partial \phi}=r\operatorname{sen}\theta(-\operatorname{sen}\phi)=-r\operatorname{sen}\theta\operatorname{sen}\phi \]
na derivada em ϕ os valores de
r e θ são constantes e o termo em
r e o seno saem da derivada.
\( y=r\operatorname{sen}\theta\operatorname{sen}\phi \):
\( \dfrac{\partial y}{\partial r}=\dfrac{\partial (r\operatorname{sen}\theta\operatorname{sen}\phi)}{\partial r}=\operatorname{sen}\theta\operatorname{sen}\phi \dfrac{\partial r}{\partial r}=\operatorname{sen}\theta\operatorname{sen}\phi\times 1=\operatorname{sen}\theta\operatorname{sen}\phi \text{, } \)
\[ \dfrac{\partial y}{\partial r}=\dfrac{\partial (r\operatorname{sen}\theta\operatorname{sen}\phi)}{\partial r}=\operatorname{sen}\theta\operatorname{sen}\phi \dfrac{\partial r}{\partial r}=\operatorname{sen}\theta\operatorname{sen}\phi\times 1=\operatorname{sen}\theta\operatorname{sen}\phi \]
na derivada em
r os valores de θ e ϕ são constantes e os termos em
seno saem da derivada.
\( \dfrac{\partial y}{\partial \theta}=\dfrac{\partial(r\operatorname{sen}\theta\operatorname{sen}\phi)}{\partial \theta}=r\operatorname{sen}\phi \dfrac{\partial (\operatorname{sen}\theta)}{\partial \theta}=r\cos\theta\operatorname{sen}\phi \text{, } \)
\[ \frac{\partial y}{\partial \theta}=\frac{\partial(r\operatorname{sen}\theta\operatorname{sen}\phi)}{\partial \theta}=r\operatorname{sen}\phi \frac{\partial (\operatorname{sen}\theta)}{\partial \theta}=r\cos\theta\operatorname{sen}\phi \]
na derivada em θ os valores de
r e ϕ são constantes e o termo em
r e o seno saem da derivada.
\( \dfrac{\partial y}{\partial \phi}=\dfrac{\partial(r\operatorname{sen}\theta\operatorname{sen}\phi)}{\partial \phi}=r\operatorname{sen}\theta\dfrac{\partial (\operatorname{sen}\phi)}{\partial \phi }=r\operatorname{sen}\theta\cos\phi \text{, } \)
\[ \dfrac{\partial y}{\partial \phi }=\dfrac{\partial(r\operatorname{sen}\theta\operatorname{sen}\phi)}{\partial \phi}=r\operatorname{sen}\theta\dfrac{\partial (\operatorname{sen}\phi)}{\partial \phi }=r\operatorname{sen}\theta\cos\phi \]
na derivada em ϕ os valores de
r e θ são constantes e o termo em
r e o seno saem da derivada.
\( z=r\cos\theta\):
\( \dfrac{\partial z}{\partial r}=\dfrac{\partial (r\cos\theta)}{\partial r}=\cos\theta\dfrac{\partial r}{\partial r}=\cos\theta\times 1=\cos\theta \text{, } \)
\[ \dfrac{\partial z}{\partial r}=\dfrac{\partial (r\cos\theta)}{\partial r}=\cos\theta\dfrac{\partial r}{\partial r}=\cos\theta\times 1=\cos\theta\]
na derivada em
r o valor de θ é constante e o termo em cosseno sai da
derivada.
\( \dfrac{\partial z}{\partial \theta}=\dfrac{\partial (r\cos\theta)}{\partial \theta}=r\dfrac{\partial (\cos\theta)}{\partial \theta}=r(-\operatorname{sen}\theta)=-r\operatorname{sen}\theta \text{, } \)
\[ \dfrac{\partial z}{\partial \theta}=\dfrac{\partial (r\cos\theta)}{\partial \theta}=r\dfrac{\partial (\cos\theta)}{\partial \theta}=r(-\operatorname{sen}\theta)=-r\operatorname{sen}\theta\]
na derivada em θ o valor de
r é constante e o termo em
r sai da
derivada.
\( \dfrac{\partial z}{\partial \phi }=\dfrac{\partial (r\cos\theta)}{\partial \phi }=0 \),
a função
z não depende de ϕ, na derivada em ϕ os valores de
r e θ são constantes e a derivada de uma constante é zero.
\[
\begin{gather}
dA=J\;d\theta\;d\phi
\end{gather}
\]
Observação: Não há variação dr pois o corpo é uma casca hemisférica de raio constante
igual à a.
\[
\begin{gather}
J=\left|
\begin{matrix}
\;\operatorname{sen}\theta\cos\phi & r\cos\theta\cos\phi & -r\operatorname{sen}\theta\operatorname{sen}\phi\;\\
\;\operatorname{sen}\theta\operatorname{sen}\phi & r\cos\theta\operatorname{sen}\phi & r\operatorname{sen}\theta\cos\phi \;\\
\;\cos\theta & -r\operatorname{sen}\theta & 0\;
\end{matrix}\right|
\end{gather}
\]
desenvolvendo o determinante pela Regra de Sarrus
\[
\begin{gather}
J=(\operatorname{sen}\theta\cos\phi)\times(r\cos\theta\operatorname{sen}\phi)\times 0+(r\cos\theta\cos\phi)\times(r\operatorname{sen}\theta\cos\phi)\times(\cos\theta)\text{+}\\
\qquad\text{+}(-r\operatorname{sen}\theta\operatorname{sen}\phi)\times(\operatorname{sen}\theta\operatorname{sen}\phi)\times(-r\operatorname{sen}\theta)-(-r\operatorname{sen}\theta\operatorname{sen}\phi)\times(r\cos\theta\operatorname{sen}\phi)\times(\cos\theta)\text{--}\\
\text{--}(\operatorname{sen}\theta\cos\phi)\times(r\operatorname{sen}\theta\cos\phi)\times(-r\operatorname{sen}\theta)-(r\cos\theta\cos\phi)\times(\operatorname{sen}\theta\operatorname{sen}\phi)\times 0 \qquad\quad\; \\[5pt]
J=0+r^2\cos^2\theta\operatorname{sen}\theta\cos^2\phi+r^2\operatorname{sen}^{3}\theta\operatorname{sen}^2\phi+r^2\cos^2\theta\operatorname{sen}\theta\operatorname{sen}^2\phi +r^2\operatorname{sen}^{3}\theta\cos^2\phi -0\\[5pt]
J=r^2[\cos^2\theta\operatorname{sen}\theta\cos^2\phi +\operatorname{sen}^{3}\theta\operatorname{sen}^2\phi +\cos^2\theta\operatorname{sen}\theta\operatorname{sen}^2\phi+\operatorname{sen}^{3}\theta\cos^2\phi ]\\[5pt]
J=r^2[\cos^2\theta\operatorname{sen}\theta\underbrace{(\cos^2\phi+\operatorname{sen}^2\phi)}_1+\operatorname{sen}^{3}\theta\underbrace{(\cos^2\phi +\operatorname{sen}^2\phi)}_1]\\[5pt]
J=r^2[\cos^2\theta\operatorname{sen}\theta+\operatorname{sen}^2\theta\operatorname{sen}\theta]\\[5pt]
J=r^2[\underbrace{(\cos^2\theta+\operatorname{sen}^2\theta )}_1\operatorname{sen}\theta]\\[5pt]
J=r^2\operatorname{sen}\theta
\end{gather}
\]
\[
\begin{gather}
dA=r^2\operatorname{sen}\theta\;d\theta\;d\phi \tag{VI}
\end{gather}
\]
substituindo a equação (VI) na equação (V)
\[
\begin{gather}
dq=\sigma r^2\operatorname{sen}\theta\;d\theta\;d\phi \tag{VII}
\end{gather}
\]
Substituindo a equação (VII) na equação (IV), e como a integração é feita sobre a superfície
do hemisfério, depende de duas variáveis θ e ϕ, temos uma integral dupla
\[
\begin{gather}
\mathbf E=\frac{1}{4\pi\epsilon_0}\iint {\frac{\sigma r^2\operatorname{sen}\theta\;d\theta\;d\phi}{r^{3}}}\;\mathbf r\\[5pt]
\mathbf E=\frac{1}{4\pi\epsilon_0}\iint {\frac{\sigma\operatorname{sen}\theta\;d\theta\;d\phi}{r}}\;\mathbf r \tag{VIII}
\end{gather}
\]
substituindo as equações (I) e (II) na equação (VIII)
\[
\begin{gather}
\mathbf E=\frac{1}{4\pi\epsilon_0}\iint{\frac{\sigma\operatorname{sen}\theta\;d\theta\;d\phi}{\left(x^2+y^2+z^2\right)^{\frac{1}{2}}}}\left(-x\;\mathbf i-y\;\mathbf j-z\;\mathbf k\right) \tag{IX}
\end{gather}
\]
substituindo as equações de (III) na equação (IX)
\[
\begin{align}
& \mathbf E=\frac{1}{4\pi\epsilon_0}\iint {\frac{\sigma\operatorname{sen}\theta\;d\theta\;d\phi}{\left[\left(a\operatorname{sen}\theta\cos\phi\right)^2+\left(a\operatorname{sen}\theta\operatorname{sen}\phi\right)^2+\left(a\cos\theta\right)^2\right]^{\frac{1}{2}}}}\;\times \\
& \qquad\qquad\qquad\qquad\qquad\qquad \times \;\left(-a\operatorname{sen}\theta\cos\phi\;\mathbf i-a\operatorname{sen}\theta\operatorname{sen}\phi \;\mathbf j-a\cos\theta\;\mathbf k\right)\\[10pt]
& \mathbf E=\frac{1}{4\pi\epsilon_0}\iint {\frac{\sigma\operatorname{sen}\theta\;d\theta\;d\phi}{\left[a^2\operatorname{sen}^2\theta\cos^2\phi +a^2\operatorname{sen}^2\theta\operatorname{sen}^2\phi+a^2\cos^2\theta\right]^{\frac{1}{2}}}}\;\times \\
& \qquad\qquad\qquad\qquad\qquad\qquad \times \;\left(-a\operatorname{sen}\theta\cos\phi\;\mathbf i-a\operatorname{sen}\theta\operatorname{sen}\phi \;\mathbf j-a\cos\theta\;\mathbf k\right)\\[10pt]
& \mathbf E=\frac{1}{4\pi\epsilon_0}\iint {\frac{-a\sigma\operatorname{sen}\theta\;d\theta\;d\phi}{a\left[\operatorname{sen}^2\theta\cos^2\phi+\operatorname{sen}^2\theta\operatorname{sen}^2\phi +\cos^2\theta\right]^{\frac{1}{2}}}}\;\times \\
& \qquad\qquad\qquad\qquad\qquad\qquad \times \;\left(\operatorname{sen}\theta\cos\phi \;\mathbf i+\operatorname{sen}\theta\operatorname{sen}\phi \;\mathbf j+\cos\theta\;\mathbf k\right)\\[10pt]
& \mathbf E=\frac{1}{4\pi\epsilon_0}\iint {\frac{-\sigma\operatorname{sen}\theta\;d\theta\;d\phi}{\left[\operatorname{sen}^2\theta\cos^2\phi+\operatorname{sen}^2\theta\operatorname{sen}^2\phi +\cos^2\theta\right]^{\frac{1}{2}}}}\;\times \\
& \qquad\qquad\qquad\qquad\qquad\qquad \times \;\left(\operatorname{sen}\theta\cos\phi \;\mathbf i+\operatorname{sen}\theta\operatorname{sen}\phi \;\mathbf j+\cos\theta\;\mathbf k\right)\\[10pt]
& \mathbf E=\frac{1}{4\pi\epsilon_0}\iint {\frac{-\sigma\operatorname{sen}\theta\;d\theta\;d\phi}{\left[\operatorname{sen}^2\theta\underbrace{\left(\cos^2\phi +\operatorname{sen}^2\phi\right)}_1+\cos^2\theta\right]^{\frac{1}{2}}}}\;\times \\
& \qquad\qquad\qquad\qquad\qquad\qquad \times \;\left(\operatorname{sen}\theta\cos\phi\;\mathbf i+\operatorname{sen}\theta\operatorname{sen}\phi \;\mathbf j+\cos\theta\;\mathbf k\right)\\[10pt]
& \mathbf E=\frac{1}{4\pi\epsilon_0}\iint {\frac{-\sigma\operatorname{sen}\theta\;d\theta\;d\phi}{\left[\underbrace{\operatorname{sen}^2\theta+\cos^2\theta}_1\right]^{\frac{1}{2}}}}\left(\operatorname{sen}\theta\cos\phi\;\mathbf i+\operatorname{sen}\theta\operatorname{sen}\phi \;\mathbf j+\cos\theta\;\mathbf k\right)\\[10pt]
& \mathbf E=\frac{1}{4\pi\epsilon_0}\iint {\frac{-\sigma\operatorname{sen}\theta\;d\theta\;d\phi}{1^{\frac{1}{2}}}}\left(\operatorname{sen}\theta\cos\phi \;\mathbf i+\operatorname{sen}\theta\operatorname{sen}\phi \;\mathbf j+\cos\theta\;\mathbf k\right)\\[10pt]
& \mathbf E=\frac{1}{4\pi\epsilon_0}\iint {-\sigma\operatorname{sen}\theta\;d\theta\;d\phi}\left(\operatorname{sen}\theta\cos\phi\;\mathbf i+\operatorname{sen}\theta\operatorname{sen}\phi;\mathbf j+\cos\theta\;\mathbf k\right)
\end{align}
\]
A densidade de carga σ é constante ela pode “sair” da integral, e a integral da soma é igual à soma
das integrais
\[
\begin{gather}
\mathbf E=-\frac{\sigma}{4\pi\epsilon_0}\left(\iint {\operatorname{sen}^2\theta\cos\phi\;d\theta\;d\phi\;\mathbf i}+\iint{\operatorname{sen}^2\theta\operatorname{sen}\phi \;d\theta\;d\phi\;\mathbf j}+\iint {\operatorname{sen}\theta\;\cos\theta\;d\theta\;d\phi\;\mathbf k}\right)
\end{gather}
\]
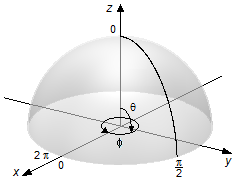
Os limites de integração serão de 0 e 2π em dϕ, uma volta completa na base do hemisfério, e
de 0 a
\( \frac{\pi}{2} \)
em dθ (Figura 2), como não existem termos “cruzados“ em ϕ e θ as
integrais podem ser separadas.
\[
\begin{align}
\mathbf E=&-\frac{\sigma}{4\pi\epsilon_0}\left(\int_0^{{\frac{\pi}{2}}}{\operatorname{sen}^2\theta\;d\theta }\underbrace{\int_0^{{2\pi}}{\cos\phi \;d\phi}}_0\;\mathbf i+\int_0^{{\frac{\pi}{2}}}{\operatorname{sen}^2\theta\;d\theta\underbrace{\int_0^{{2\pi}}{\operatorname{sen}\phi \;d\phi}}_0\;\mathbf j}+\right. \\
&+\left.\int_0^{{\frac{\pi}{2}}}{\operatorname{sen}\theta\cos\theta\;d\theta}\int_0^{{2\pi}}{d\phi\;\mathbf k}\right)
\end{align}
\]
Integral de
\( \displaystyle \int_0^{{2\pi}}\cos\phi \;d\phi \)
1.º método
\[
\begin{align}
\int_0^{{2\pi}}\cos\phi \;d\phi &=\left.\operatorname{sen}\phi\;\right|_{\;0}^{\;2\pi}=\operatorname{sen}2\pi-\operatorname{sen}0=\\
&=0-0=0
\end{align}
\]
2.º método
O gráfico de cosseno entre 0 e 2π possui uma área “positiva” acima do eixo-x, entre 0 e
\( \frac{\pi}{2} \)
e entre
\( \frac{3\pi}{2} \)
e 2π, e uma área “negativa” abaixo do eixo-x, entre
\( \frac{\pi}{2} \)
e
\( \frac{3\pi}{2} \),
estas duas áreas se cancelam no cálculo da integral, sendo o valor da integral
igual a zero (Figura 3).
Integral de
\( \displaystyle \int_0^{{2\pi}}\operatorname{sen}\phi \;d\phi \)
1.º método
\[
\begin{align}
\int_0^{{2\pi}}\operatorname{sen}\phi \;d\phi &=\left.-\cos\phi\;\right|_{\;0}^{\;2\pi}=-(\cos 2\pi-\cos 0)=\\
&=-(1-1)=0
\end{align}
\]
2.º método
O gráfico do seno entre 0 e 2π possui uma área “positiva” acima do eixo-x, entre 0 e π,
e uma área “negativa” abaixo do eixo-x, entre π e 2π, estas duas áreas se cancelam no
cálculo da integral, sendo o valor da integral zero (Figura 4).
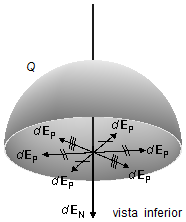
Observação: As duas integrais, nas direções i e j, que são nulas
representam o cálculo matemático para a afirmação que se faz usualmente de que as componentes do campo
elétrico paralelas ao plano-xy dEP se anulam. Apenas as
componentes normais ao plano dEN contribuem para o campo elétrico total
(Figura 5).
Integral de
\( \displaystyle \int_0^{{\frac{\pi}{2}}}\operatorname{sen}\theta\cos\theta\;d\theta\)
fazendo a mudança de variável
\[
\begin{array}{l}
u=\operatorname{sen}\theta \\[5pt]
\dfrac{du}{d\theta }=\cos\theta\Rightarrow d\theta=\dfrac{du}{\cos\theta}
\end{array}
\]
fazendo a mudança dos extremos de integração
para θ = 0
temos
\( u=\operatorname{sen}0\Rightarrow u=0 \)
para
\( \theta =\dfrac{\pi}{2} \)
temos
\( u=\operatorname{sen}\dfrac{\pi}{2}\Rightarrow u=1 \)
\[
\begin{align}
\int_0^{1}u\cos\theta\frac{du}{\cos\theta} &=\int_0^{1}u\;du=\left.\frac{u^2}{2}\;\right|_0^{1}=\\[5pt]
&=\left(\frac{1^2}{2}-\frac{0^2}{2}\right)=\frac{1}{2}
\end{align}
\]
Integral de
\( \displaystyle \int_0^{{2\pi}}\;d\phi \)
\[
\begin{gather}
\int_0^{{2\pi}}\;d\phi=\left.\phi \;\right|_{\;0}^{\;2\pi}=2\pi-0=2\pi
\end{gather}
\]
\[
\begin{gather}
\mathbf E=-\frac{\sigma}{4\pi\epsilon_0}\left[0\;\mathbf i-0\;\mathbf j+\frac{1}{2}\times 2\pi\;\mathbf k\right]\\[5pt]
\mathbf E=-\frac{\sigma}{4\epsilon_0}\;\mathbf k \tag{X}
\end{gather}
\]
A densidade superficial de carga é dada por
\[
\begin{gather}
\sigma=\frac{Q}{A} \tag{XI}
\end{gather}
\]
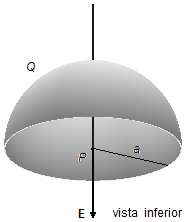
onde Q é a carga do hemisfério e A a sua área. A área de um hemisfério é metade da área de
uma esfera,
\( A_{E}=4\pi r^2 \)
com r = a
\[
\begin{gather}
A=\frac{A_{E}}{2}\\[5pt]
A=\frac{4\pi a^2}{2}\\[5pt]
A=2\pi a^2 \tag{XII}
\end{gather}
\]
substituindo a equação (XII) na equação (XI) e esta na equação (X) (Figura 6)
\[
\begin{gather}
\mathbf E=-{\frac{1}{4\epsilon_0}}\frac{Q}{2\pi a^2}\;\mathbf k
\end{gather}
\]
\[ \bbox[#FFCCCC,10px]
{\mathbf E=-{\frac{Q}{8\epsilon_0\pi a^2}}\;\mathbf k}
\]