Exercício Resolvido de Oscilações Harmônicas
publicidade
Determine a equação de movimento e o período de oscilações para um pêndulo simples no regime de pequenas oscilações.
Esquema do problema:
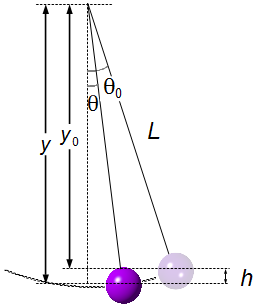
Vamos adotar que o pêndulo é formado por uma esfera, de massa m, e um corda de comprimento
L, inextensível e de massa desprezível. Consideremos o raio da esfera muito pequeno, de tal modo
que pode ser desprezado em relação ao comprimento da corda. Se a massa da corda e o raio da esfera não
pudessem ser desprezados teríamos um pêndulo composto (Figura 1).
O ângulo inicial de deslocamento do pêndulo é θ0, neste ponto a distância da massa ao ponto de fixação do pêndulo, medida na vertical, é igual à y0. Quando o pêndulo oscila, num instante qualquer, ele terá um ângulo θ de deslocamento e uma distância y em relação ao ponto de fixação.
O ângulo inicial de deslocamento do pêndulo é θ0, neste ponto a distância da massa ao ponto de fixação do pêndulo, medida na vertical, é igual à y0. Quando o pêndulo oscila, num instante qualquer, ele terá um ângulo θ de deslocamento e uma distância y em relação ao ponto de fixação.
Solução
A variação da Energia Potencial, ΔEP, quando ele se desloca de uma altura h, é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\Delta E_{P}=mgh} \tag{I}
\end{gather}
\]
Assumindo que o pêndulo está inicialmente em repouso, a variação da Enegia Cinética,
ΔEC, é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\Delta E_{C}=\frac{1}{2}mv^{2}} \tag{II}
\end{gather}
\]
Como a energia se conserva, não há dissipação de energia neste sistema, a enegia potencial é convertida em
energia cinética
\[
\Delta E_{P}=\Delta E_{C}
\]
igualando as expressões (I) e (II)
\[
\begin{gather}
mgh=\frac{1}{2}mv^{2} \tag{III}
\end{gather}
\]
da expressão (III) a velocidade tangencial v é dada por
\[
\begin{gather}
v=\sqrt{2gh} \tag{IV}
\end{gather}
\]
A velocidade tangencial é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v=\omega r} \tag{V}
\end{gather}
\]
igualando as expressões (IV) e (V)
\[
\begin{gather}
\omega r=\sqrt{2gh} \tag{VI}
\end{gather}
\]
escrevendo
\( \omega =\dot{\theta} \)
e fazendo r = L
\[
\begin{gather}
\dot{\theta}L=\sqrt{2gh}\\
\dot{\theta}=\frac{\sqrt{2gh}}{L} \tag{VII}
\end{gather}
\]
A diferença de altura, h, entre dois instantes da oscilação será (Figura 1)
\[
\begin{gather}
h=y-y_{0} \tag{VIII}
\end{gather}
\]
usando a Trigonometria podemos escrever as distâncias, y0 e y, em função de
L, θ e θ0 (Figura 1)
\[
\begin{gather}
y_{0}=L\cos \theta _{0} \tag{IX-a}\\[10pt]
y=L\cos \theta \tag{IX-b}
\end{gather}
\]
substituindo as expressões (IX-a) e (IX-b) na expressão (VIII)
\[
\begin{gather}
h=L\cos \theta -L\cos \theta _{0}\\[5pt]
h=L\left(\cos \theta-\cos \theta _{0}\right) \tag{X}
\end{gather}
\]
substituindo a expressão (X) na expressão (VII)
\[
\begin{gather}
\dot{\theta}=\frac{\sqrt{2gL\left(\cos \theta -\cos\theta _{0}\right)}}{L}\\[5pt]
\dot{\theta}=\sqrt{\frac{2gL}{L^{2}}\left(\cos \theta -\cos \theta_{0}\right)}\\[5pt]
\dot{\theta}=\sqrt{\frac{2g}{L}\left(\cos \theta -\cos\theta _{0}\right)} \tag{XI}
\end{gather}
\]
Para encontrar a equação de movimento derivamos a expressão (XI) em função do tempo
\[
\frac{d}{dt}\dot{\theta}=\frac{d}{dt}\sqrt{\frac{2g}{L}\left(\cos \theta -\cos \theta_{0}\right)}
\]
Derivada de \( \displaystyle \left[\frac{2g}{L}\left(\cos \theta -\cos \theta_{0}\right)\right]^{1/2} \)
esta é uma função composta cuja derivada é dada pela regra da cadeia
esta é uma função composta cuja derivada é dada pela regra da cadeia
\[
\frac{dv[(w)]}{dt}=\frac{dv}{dw}\frac{dw}{dt}
\]
com
\( v(w)=w^{1/2} \)
e
\( w(t)=\frac{g}{L}\left(\cos \theta -\cos \theta _{0}\right) \),
assim a derivada será
\[
\begin{gather}
\frac{dv[(w)]}{dt}=\frac{1}{2}w^{-1/2}\left(\frac{dw}{dt}\right)\left(\frac{d\theta}{dt}\right)\\
\frac{dv[(w)]}{dt}=\frac{1}{2}\left[\frac{2g}{L}\left(\cos\theta -\cos \theta_{0}\right)\right]^{-1/2}\left(-{\frac{2g}{L}}\operatorname{sen}\theta\right)\frac{d\theta}{dt}
\end{gather}
\]
Observação: A variável θ depende do tempo, por isso deve ser derivada, último termo da
derivação, e θ0 é uma constante, sua derivada é zero.
\[
\ddot{\theta}=\frac{1}{2}\left[\frac{2g}{L}\left(\cos \theta -\cos\theta_{0}\right)\right]^{-1/2}\left(-{\frac{2g}{L}}\operatorname{sen}\theta\right)\dot{\theta}
\]
substituindo pela expressão (XI)
\[
\begin{gather}
\ddot{\theta}=\frac{1}{\cancel{2}}\cancel{\left[\frac{2g}{L}\left(\cos\theta -\cos \theta_{0}\right)\right]^{-1/2}}\left(-{\frac{\cancel{2}g}{L}}\operatorname{sen}\theta\right)\cancel{\left[\frac{2g}{L}\left(\cos \theta -\cos \theta_{0}\right)\right]^{1/2}}\\[5pt]
\ddot{\theta}=-{\frac{g}{L}}\operatorname{sen}\theta \\[5pt]
\ddot{\theta}+\frac{g}{L}\operatorname{sen}\theta =0
\end{gather}
\]
como estamos trabalhando em um regime de pequenas oscilações podemos expandir a função sen θ em uma
série de Taylor.
Expansão em série de Taylor de sen θ
\( \displaystyle \frac{f^{0}(0)}{0!}\theta ^{0}=\frac{\operatorname{sen}0}{1}.1=0 \)
Observação: \( f^{0} \) NÃO significa a função f elevada a potência zero, significa a derivada de ordem zero da função f, ou seja, a própria função calculada no pondo a.
\( \displaystyle \frac{f^{\text{I}}(0)}{1!}\theta ^{1}=\frac{\cos 0}{1}\theta =\theta \)
\( \displaystyle \frac{f^{\text{II}}(0)}{2!}\theta^{2}=\frac{-\operatorname{sen}0}{2.1}\theta ^{2}=0 \)
\( \displaystyle \frac{f^{\text{III}}(0)}{3!}\theta ^{3}=\frac{-\cos 0}{3.2.1}\theta^{3}=-{\frac{\theta ^{3}}{6}} \)
\( \displaystyle \frac{f^{\text{IV}}(0)}{4!}\theta^{4}=\frac{-(-\operatorname{sen}0)}{4.3.2.1}\theta ^{4}=0 \)
\( \displaystyle \frac{f^{\text{V}}(0)}{5!}\theta ^{5}=\frac{\cos 0}{5.4.3.2.1}\theta^{5}=\frac{\theta ^{5}}{120} \)
A função seno pode ser representada pela seguinte série de potências
Para um ângulo de \( 10°=\frac{\pi}{18}=0,1745 \), temos \( \operatorname{sen}\frac{\pi}{18}=0,1736 \), a aproximação representa um erro de 0,5%.
\[ \bbox[#99CCFF,10px]
{f(x)=\sum _{n=0}^{\infty}{\frac{f^{n}(a)}{n!}(x-a)^{n}}}
\]
fazendo a expansão em torno do ponto de equilíbrio com a = 0, para os 6 primeiros termos da série,
temos
\( \displaystyle \frac{f^{0}(0)}{0!}\theta ^{0}=\frac{\operatorname{sen}0}{1}.1=0 \)
Observação: \( f^{0} \) NÃO significa a função f elevada a potência zero, significa a derivada de ordem zero da função f, ou seja, a própria função calculada no pondo a.
\( \displaystyle \frac{f^{\text{I}}(0)}{1!}\theta ^{1}=\frac{\cos 0}{1}\theta =\theta \)
\( \displaystyle \frac{f^{\text{II}}(0)}{2!}\theta^{2}=\frac{-\operatorname{sen}0}{2.1}\theta ^{2}=0 \)
\( \displaystyle \frac{f^{\text{III}}(0)}{3!}\theta ^{3}=\frac{-\cos 0}{3.2.1}\theta^{3}=-{\frac{\theta ^{3}}{6}} \)
\[ \displaystyle \frac{f^{\text{III}}(0)}{3!}\theta ^{3}=\frac{-\cos 0}{3.2.1}\theta^{3}=-{\frac{\theta ^{3}}{6}} \]
\( \displaystyle \frac{f^{\text{IV}}(0)}{4!}\theta^{4}=\frac{-(-\operatorname{sen}0)}{4.3.2.1}\theta ^{4}=0 \)
\[ \displaystyle \frac{f^{\text{IV}}(0)}{4!}\theta^{4}=\frac{-(-\operatorname{sen}0)}{4.3.2.1}\theta ^{4}=0 \]
\( \displaystyle \frac{f^{\text{V}}(0)}{5!}\theta ^{5}=\frac{\cos 0}{5.4.3.2.1}\theta^{5}=\frac{\theta ^{5}}{120} \)
\[ \displaystyle \frac{f^{\text{V}}(0)}{5!}\theta ^{5}=\frac{\cos 0}{5.4.3.2.1}\theta^{5}=\frac{\theta ^{5}}{120} \]
A função seno pode ser representada pela seguinte série de potências
\[
\operatorname{sen}\theta =\theta -\frac{\theta ^{3}}{6}+\frac{\theta^{5}}{120}-...
\]
Como estamos considerando θ um ângulo pequeno podemos fazer a aproximação
\[
\operatorname{sen}\theta \approx \theta
\]
e desprezamos os termos de potências maiores.Para um ângulo de \( 10°=\frac{\pi}{18}=0,1745 \), temos \( \operatorname{sen}\frac{\pi}{18}=0,1736 \), a aproximação representa um erro de 0,5%.
\[
\ddot{\theta}+\frac{g}{L}\theta =0
\]
Solução da equação diferencial \( \displaystyle \ddot{\theta}+\frac{g}{L}\theta =0 \)
A solução é do tipo exponencial, calculando suas derivadas, temos
A solução é do tipo exponencial, calculando suas derivadas, temos
\[
\begin{array}{l}
\theta =\operatorname{e}^{\lambda t} \\
\dot{\theta}=\lambda \operatorname{e}^{\lambda t} \\
\ddot{\theta}=\lambda^{2}\operatorname{e}^{\lambda t}
\end{array}
\]
substituindo na equação
\[
\begin{gather}
\lambda ^{2}\operatorname{e}^{\lambda t}+\frac{g}{L}\operatorname{e}^{\lambda t}=0\\
\lambda^{2}+\frac{g}{L}=0\\\lambda ^{2}=-{\frac{g}{L}}\\
\lambda =\pm i\sqrt{\frac{g}{L}}
\end{gather}
\]
fazendo a seguinte definição
\( \omega_{0}^{2}=\frac{g}{L} \)
a solução é da seguinte forma, onde C1 e C2 são constantes
\[
\theta (t)=C_{1}\operatorname{e}^{i\omega_{0}t}+C_{2}\operatorname{e}^{-i\omega_{0}t}
\]
usando a fórmula de Euler
\( \operatorname{e}^{ix}=\cos x+i\operatorname{sen}x \)
\[
\begin{gather}
\theta (t)=C_{1}\left(\cos \omega_{0}t+i\operatorname{sen}\omega_{0}t\right)+C_{2}\left(\cos \omega_{0}t-i\operatorname{sen}\omega_{0}t\right)\\
\theta(t)=\left(C_{1}+C_{2}\right)\cos \omega_{0}t-i\left(C_{2}-C_{1}\right)\operatorname{sen}\omega_{0}t
\end{gather}
\]
definindo as seguintes constantes
\[
A=C_{1}+C_{2}\ \ ,\ \ B=i(C_{2}-C_{1})
\]
\[
\theta (t)=A\cos \omega_{0}t+B\operatorname{sen}\omega_{0}t
\]
fazendo as seguintes definições
\[
\begin{array}{l}
\cos \phi=\dfrac{A}{\sqrt{A^{2}+B^{2}}}\\
\operatorname{sen}\phi=\dfrac{B}{\sqrt{A^{2}+B^{2}}}\\
\theta_{0}=\sqrt{A^{2}+B^{2}}
\end{array}
\]
substituindo na equação
\[
\begin{gather}
\theta (t)=\left(A\cos \omega_{0}t-B\operatorname{sen}\omega_{0}t\right)\frac{\sqrt{A^{2}+B^{2}}}{\sqrt{A^{2}+B^{2}}}\\[5pt]
\theta(t)=\sqrt{A^{2}+B^{2}}\left(\frac{A}{\sqrt{A^{2}+B^{2}}}\cos \omega_{0}t-\frac{B}{\sqrt{A^{2}+B^{2}}}\operatorname{sen}\omega_{0}t\right)\\[5pt]
\theta (t)=\theta_{0}\left(\cos \phi \cos \omega_{0}t-\operatorname{sen}\phi \operatorname{sen}\omega_{0}t\right)
\end{gather}
\]
A equção de movimento será
\[ \bbox[#FFCCCC,10px]
{\theta (t)=\theta _{0}\cos \left(\omega_{0}t+\phi \right)}
\]
O período de oscilações é dado por
\[ \bbox[#99CCFF,10px]
{T=\frac{2\pi }{\omega_{0}}}
\]
substituindo a definição de ω02 feita acima
\[
T=\frac{2\pi }{\sqrt{\frac{g}{L}}}
\]
\[ \bbox[#FFCCCC,10px]
{T=2\pi \sqrt{\frac{L}{g}}}
\]
publicidade

Fisicaexe - Exercícios Resolvidos de Física de Elcio Brandani Mondadori está licenciado com uma Licença Creative Commons - Atribuição-NãoComercial-Compartilha Igual 4.0 Internacional .