Exercício Resolvido de Oscilações Harmônicas
publicidade
Um bloco de massa m é ligado a uma mola de constante elástica k e a um amortecedor de
constante de amortecimento b. O bloco é deslocado de sua posição de equilíbrio O até um ponto
x0 e liberado a partir do repouso. Determine:
a) A equação diferencial do movimento;
b) A solução da equação para o sistema no caso de amortecimento subcrítico e a frequência angular das oscilações.
a) A equação diferencial do movimento;
b) A solução da equação para o sistema no caso de amortecimento subcrítico e a frequência angular das oscilações.

Dados do problema:
- Massa do corpo: m;
- Constante elástica da mola: k;
- Constante de amortecimento: b;
- Posição inicial (t = 0): x0;
- Velocidade inicial (t = 0): v0 = 0.
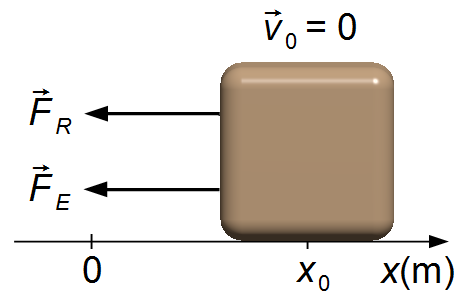
Esquema do problema:
Adotamos um sistema de referência com sentido positivo para a direita. O bloco é deslocado até a posição
x0 e liberado com velocidade inicial igual a zero. Quando solto a força elástica da
mola atuará no sentido de restabelecer o posição de equilíbrio (Figura 1). Com isto escrevemos as
Condições Iniciais do problema
\[
\begin{align}
& x(0)=x_{0}\\[10pt]
& v_{0}=\frac{dx(0)}{dt}=0
\end{align}
\]
Solução
a) Aplicando a 2.ª Lei de Newton (Figura 1)
\[
\begin{gather}
\bbox[#99CCFF,10px]
{F=m\frac{d^{2}x}{dt^{2}}} \tag{I}
\end{gather}
\]
as forças que atuam no bloco são a força elástica da mola
\( {\vec{F}}_{E} \)
e a força de amortecimento
\( {\vec{F}}_{R} \)
dadas, em módulo, por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{F_{E}=-kx} \tag{II-a}
\end{gather}
\]
\[
\begin{gather}
\bbox[#99CCFF,10px]
{F_{R}=-bv=-b\frac{dx}{dt}} \tag{II-b}
\end{gather}
\]
o sinal de negativo na força elástica indica que ela atua contra o sentido do deslocamento do bloco
(atua no sentido de restabelecer o equilíbrio), na força de amortecimento indica que ela atua
contra o sentido da velocidade (atua no sentido de frear o movimento). Substituindo as expressões
(II-a) e (II-b) na expressão (I)
\[
\begin{gather}
-kx-b\frac{dx}{dt}=m\frac{d^{2}x}{dt^{2}}\\[5pt]
m\frac{d^{2}x}{dt^{2}}+b\frac{dx}{dt}+kx=0
\end{gather}
\]
esta é uma Equação Diferencial Ordinária Homogênea de 2.ª Ordem. Dividindo toda a equação pela
massa m
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\frac{d^{2}x}{dt^{2}}+\frac{b}{m}\frac{dx}{dt}+\frac{k}{m}x=0}
\end{gather}
\]
b) Na equação do item anterior vamos fazer as seguintes definições
\[
\begin{gather}
2\gamma \equiv \frac{b}{m} \tag{III-a}\\[10pt]
\omega_{0}^{2}\equiv\frac{k}{m} \tag{III-b}
\end{gather}
\]
\[
\begin{gather}
\frac{d^{2}x}{dt^{2}}+2\gamma \frac{dx}{dt}+\omega_{0}^{2}x=0
\end{gather}
\]
Solução de \( \displaystyle \frac{d^{2}x}{dt^{2}}+2\gamma \frac{dx}{dt}+\omega_{0}^{2}x=0 \)
A solução deste tipo de equação é encontrada fazendo-se as substituições
A frequência angular ω é dada por
A solução deste tipo de equação é encontrada fazendo-se as substituições
\[
\begin{align}
& x=\operatorname{e}^{\lambda t}\\[10pt]
& \frac{dx}{dt}=\lambda \operatorname{e}^{\lambda t}\\[10pt]
& \frac{d^{2}x}{dt^{2}}=\lambda ^{2}\operatorname{e}^{\lambda t}
\end{align}
\]
substituindo estes valores na equação diferencial
\[
\begin{gather}
\lambda ^{2}\operatorname{e}^{\lambda t}+2\gamma \lambda\operatorname{e}^{\lambda t}+\omega_{0}^{2}\operatorname{e}^{\lambda t}=0\\[5pt]
\operatorname{e}^{\lambda t}\left(\lambda ^{2}+2\gamma \lambda+\omega_{0}^{2}\right)=0\\[5pt]
\lambda ^{2}+2\gamma \lambda +\omega_{0}^{2}=\frac{0}{\operatorname{e}^{\lambda t}}\\[5pt]
\lambda ^{2}+2\gamma\lambda +\omega_{0}^{2}=0
\end{gather}
\]
esta é a Equação Característica que tem como solução
\[
\begin{gather}
\Delta =b^{2}-4ac=\left(2\gamma \right)^{2}-4.1.\omega_{0}^{2}=4\gamma^{2}-4\omega_{0}^{2}=4\left(\gamma^{2}-\omega_{0}^{2}\right)\\[10pt]
\lambda_{1}=\frac{-b+\sqrt{\Delta\;}}{2a}=\frac{-2\gamma +\sqrt{4\left(\gamma^{2}-\omega_{0}^{2}\right)\;}}{2.1}=-{\frac{2\gamma}{2}}+\frac{2\sqrt{\gamma^{2}-\omega_{0}^{2}\;}}{2}=-\gamma +\sqrt{\gamma^{2}-\omega_{0}^{2}\;}\\[5pt]
\lambda_{2}=\frac{-b-\sqrt{\Delta\;}}{2a}=\frac{-2\gamma -\sqrt{4\left(\gamma^{2}-\omega_{0}^{2}\right)\;}}{2.1}=-{\frac{2\gamma}{2}}-\frac{2\sqrt{\gamma^{2}-\omega_{0}^{2}\;}}{2}=-\gamma -\sqrt{\gamma^{2}-\omega_{0}^{2}\;}
\end{gather}
\]
Para que o sistema oscile com amortecimento subcrítico devemos ter
ω02>γ2, o termo na raiz quadrada será
\[
\begin{gather}
\sqrt{-1.\left(\omega_{0}^{2}-\gamma^{2}\right)\;}=\sqrt{-1}.\sqrt{\left(\omega_{0}^{2}-\gamma^{2}\right)\;}=\mathsf{i}\sqrt{\left(\omega_{0}^{2}-\gamma^{2}\right)\;}
\end{gather}
\]
onde \( \mathsf{i}=\sqrt{-1\;} \).A frequência angular ω é dada por
\[
\begin{gather}
\omega =\sqrt{\omega_{0}^{2}-\gamma^{2}\;}
\end{gather}
\]
Usando as definições feitas em (III-a) e (III-b) para ω02 e γ
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\omega =\sqrt{\frac{k}{m}-\left(\frac{b}{2m}\right)^{2}\;}}
\end{gather}
\]
A solução da equação diferencial será
Derivando a expressão (IV) em relação ao tempo
\[
\begin{gather}
x=C_{1}\operatorname{e}^{\lambda_{1}t}+C_{2}\operatorname{e}^{\lambda_{2}t}\\[5pt]
x=C_{1}\operatorname{e}^{\left(-\gamma +\mathsf{i}\sqrt{\omega_{0}^{2}-\gamma^{2}\;}\right)t}+C_{2}\operatorname{e}^{\left(-\gamma-\mathsf{i}\sqrt{\omega_{0}^{2}-\gamma^{2}\;}\right)t}\\[5pt]
x=C_{1}\operatorname{e}^{\left(-\gamma t+\mathsf{i}\sqrt{\omega_{0}^{2}-\gamma^{2}\;}t\right)}+C_{2}\operatorname{e}^{\left(-\gamma t-\mathsf{i}\sqrt{\omega_{0}^{2}-\gamma^{2}\;}t\right)}\\[5pt]
x=C_{1}\operatorname{e}^{-\gamma t}\operatorname{e}^{\mathsf{i}\omega \;t}+C_{2}\operatorname{e}^{-\gamma t}\operatorname{e}^{-\mathsf{i}\omega t}\\[5pt]
x=\operatorname{e}^{-\gamma t}\left(C_{1}\operatorname{e}^{\mathsf{i}\omega t}+C_{2}\operatorname{e}^{-\mathsf{i}\omega t}\right)
\end{gather}
\]
onde C1 e C2 são constantes de integração, usando a
Fórmula de Euler \( \operatorname{e}^{\mathsf{i}\theta }=\cos \theta +\mathsf{i}\operatorname{sen}\theta \)
\[
\begin{gather}
x=\operatorname{e}^{-\gamma t}\left[C_{1}\left(\cos \omega t+\mathsf{i}\operatorname{sen}\omega t\right)+C_{2}\left(\cos \omega t-\mathsf{i}\operatorname{sen}\omega t\right)\right]\\[5pt]
x=\operatorname{e}^{-\gamma t}\left(C_{1}\cos \omega t+\mathsf{i}C_{1}\operatorname{sen}\omega t+C_{2}\cos \omega t-\mathsf{i}C_{2}\operatorname{sen}\omega t\right)\\[5pt]
x=\operatorname{e}^{-\gamma t}\left[\left(C_{1}+C_{2}\right)\cos \omega t+\mathsf{i}\left(C_{1}-C_{2}\right)\operatorname{sen}\omega t\right]
\end{gather}
\]
definindo duas novas constantes α e β em termos de C1 e C2
\[
\begin{gather}
\alpha \equiv C_{1}+C_{2}\\[5pt]
\text{e}\\[5pt]
\beta \equiv \mathsf{i}(C_{1}-C_{2})
\end{gather}
\]
\[
\begin{gather}
x=\operatorname{e}^{-\gamma t}\left(\alpha \cos \omega t+\beta\operatorname{sen}\omega t\right) \tag{IV}
\end{gather}
\]
onde α e β são constantes determinadas pelas Condições Iniciais.
Derivando a expressão (IV) em relação ao tempo
\[
\begin{gather}
x=\underbrace{\operatorname{e}^{-\gamma t}}_{u}\underbrace{\left(\alpha\cos \omega t+\beta \operatorname{sen}\omega t\right)}_{v}
\end{gather}
\]
usando a Regra do Produto para derivada de funções
\[
\begin{gather}
(uv)'=u'v+uv'
\end{gather}
\]
onde
\( u=\operatorname{e}^{-\gamma t} \)
e
\( v=\left(\alpha \cos \omega t+\beta \operatorname{sen}\omega t\right) \), o termo entre
parênteses é uma soma de funções, a derivada da soma é soma das derivadas
\[
\begin{gather}
(f+g)'=f'+g'
\end{gather}
\]
e as funções seno e cosseno entre parênteses são funções compostas, uasando a Regra da Cadeia
\[
\begin{gather}
\frac{dv[w(t)]}{dt}=\frac{dv}{dw}\frac{dw}{dt}
\end{gather}
\]
com
\( v_{1}=\alpha\cos w \),
\( v_{2}=\beta\operatorname{sen}w \)
e
\( w=\omega t \)
\[
\begin{gather}
\frac{dx}{dt}=\frac{du}{dt}v+u\frac{dv}{dt}\\[5pt]
\frac{dx}{dt}=\frac{du}{dt}v+u\left(\frac{df}{dt}+\frac{dg}{dt}\right)\\[5pt]
\frac{dx}{dt}=\frac{du}{dt}v+u\left(\frac{dv_{1}}{dw}\frac{dw}{dt}+\frac{dv_{2}}{dw}\frac{dw}{dt}\right)\\[5pt]
\frac{dx}{dt}=\frac{d\left(\operatorname{e}^{-\gamma t} \right)}{dt}\left(\alpha \cos \omega t+\beta \operatorname{sen}\omega t\right)+\left(\operatorname{e}^{-\gamma t} \right)\left[\frac{d(\alpha\cos w)}{dw}\frac{d(\omega t)}{dt}+\frac{d(\beta\operatorname{sen}w)}{dw}\frac{d(\omega t)}{dt}\right]\\[5pt]
\frac{dx}{dt}=-\gamma \operatorname{e}^{-\gamma t}\left(\alpha \cos \omega t+\beta \operatorname{sen}\omega t\right)+\operatorname{e}^{-\gamma t}\left[(-\alpha\operatorname{sen} w)(\omega)+(\beta\cos w)(\omega)\right]\\[5pt]
\frac{dx}{dt}=-\gamma \operatorname{e}^{-\gamma t}\left(\alpha \cos \omega t+\beta \operatorname{sen}\omega t\right)+\operatorname{e}^{-\gamma t}\left(-\omega\alpha\operatorname{sen} \omega t+\omega\beta\cos \omega t\right)\\[5pt]
\frac{dx}{dt}=\operatorname{e}^{-\gamma t}\left(-\gamma\alpha \cos \omega t-\gamma\beta \operatorname{sen}\omega t-\omega\alpha\operatorname{sen} \omega t+\omega\beta\cos \omega t\right)\\[5pt]
\frac{dx}{dt}=\operatorname{e}^{-\gamma t}\left[-\alpha \left(\gamma\cos \omega t+\omega\operatorname{sen} \omega t\right)-\beta \left(\gamma\operatorname{sen}\omega t-\omega\cos \omega t\right)\right] \tag{V}
\end{gather}
\]
Substituindo as Condições Iniciais nas expressões (IV) e (V)
\[
\begin{gather}
x(0)=x_{0}=\operatorname{e}^{-\gamma .0}\left(\alpha \cancelto{1}{\cos \omega .0}+\beta \cancelto{0}{\operatorname{sen}\omega .0}\right)\\[5pt]
\alpha=x_{0} \tag{VI}
\end{gather}
\]
\[
\begin{gather}
\frac{dx(0)}{dt}=0=\operatorname{e}^{-\gamma .0}\left[-\alpha \left(\gamma \cancelto{1}{\cos \omega .0}+\omega\cancelto{0}{\operatorname{sen}\omega .0}\right)-\beta \left(\gamma\cancelto{0}{\operatorname{sen}\omega .0}-\omega \cancelto{1}{\cos \omega .0}\right)\right]\\[5pt]
0=1.\left[-x_{0} \gamma+\beta \omega \right]\\[5pt]
-x_{0}\gamma +\beta \omega =0\\[5pt]
\beta=\frac{x_{0}\gamma}{\omega} \tag{VII}
\end{gather}
\]
substituindo as constantes (VI) e (VII) na expressão (IV)
\[
\begin{gather}
x=\operatorname{e}^{-\gamma t}\left(x_{0}\cos \omega t+\frac{x_{0}\gamma}{\omega}\operatorname{sen}\omega t\right)
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{x(t)=x_{0}\operatorname{e}^{-\gamma t}\left(\cos \omega t+\frac{\gamma}{\omega}\operatorname{sen}\omega t\right)}
\end{gather}
\]
publicidade

Fisicaexe - Exercícios Resolvidos de Física de Elcio Brandani Mondadori está licenciado com uma Licença Creative Commons - Atribuição-NãoComercial-Compartilha Igual 4.0 Internacional .