Exercício Resolvido de Dinâmica das Rotações
publicidade
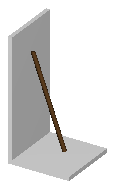
Uma barra homogênea e de seção constante encontra-se apoiada pelas suas extremidades sobre o chão e
contra uma parede. Determinar o ângulo máximo que a barra pode formar com o plano vertical para que
permaneça em equilíbrio sem escorregar nos seguintes casos:
a) Se o coeficiente de atrito da barra com o chão é μ1 e o coeficiente de atrito da barra com a parede é μ2;
b) Se o coeficiente de atrito da barra com o chão e da barra com a parede são iguais a μ;
c) Se o coeficiente de atrito da barra com o chão é μ e o coeficiente de atrito da barra com a parede é nulo.
a) Se o coeficiente de atrito da barra com o chão é μ1 e o coeficiente de atrito da barra com a parede é μ2;
b) Se o coeficiente de atrito da barra com o chão e da barra com a parede são iguais a μ;
c) Se o coeficiente de atrito da barra com o chão é μ e o coeficiente de atrito da barra com a parede é nulo.
Solução
a) A barra tem a tendência de escorregar e faz força horizontal no chão, o chão reage com a força de
atrito Fat1, a barra também faz força vertical na parede, a parede reage com a
força de atrito Fat2 (Figura 1-A).
A barra está apoiada sobre o chão, o chão reage com a força normal FN1, a barra também está apoiada contra a parede e a parede reage com a força normal FN2. Como a barra é homogênea e de seção constante adotamos a força peso aplicada ao centro da barra apontada verticalmente para baixo (Figura 1-B).
A barra está apoiada sobre o chão, o chão reage com a força normal FN1, a barra também está apoiada contra a parede e a parede reage com a força normal FN2. Como a barra é homogênea e de seção constante adotamos a força peso aplicada ao centro da barra apontada verticalmente para baixo (Figura 1-B).
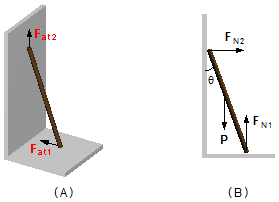 Figura 1
Figura 1
Observação: Do ponto de vista formal a força peso (P) aplicada no meio da barra pode
ser decomposta em duas, uma componente paralela à barra (PP), em módulo
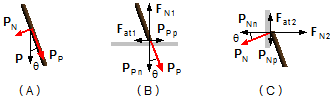 Figura 2
Figura 2
A componente paralela é transmitida pela barra até o chão, esta componente pode ser novamente decomposta em duas, uma componente normal ao chão (PPn), em módulo
A componente normal é transmitida pela barra até a parede, esta componente pode ser novamente decomposta em duas, uma componente normal à parede (PNn), em módulo (Figura 2-C)
\[
P_{P}=P\cos \theta
\]
e outra componente normal ou perpendicular (PN), em módulo (Figura 2-A)
\[
P_{N}=P\operatorname{sen}\theta
\]
A componente paralela é transmitida pela barra até o chão, esta componente pode ser novamente decomposta em duas, uma componente normal ao chão (PPn), em módulo
\[
P_{Pn}=P_{P}\cos \theta =P\cos \theta \cos \theta =P\cos^{2}\theta
\]
esta componente é a responsável pela reação normal FN1. E outra componente
paralela ao solo (PPp), em módulo (Figura 2-B)
\[
P_{Pp}=P_{P}\operatorname{sen}\theta =P\cos \theta\operatorname{sen}\theta
\]
Lembrando da Trigonometria que
\[
\operatorname{sen}(a+b)=\operatorname{sen}a\cos b+\operatorname{sen}b\cos a
\]
no problema a = b = θ
\[
\begin{gather}
\operatorname{sen}(\theta +\theta)=\operatorname{sen}2\theta =\operatorname{sen}\theta \cos \theta+\operatorname{sen}\theta \cos \theta =2\operatorname{sen}\theta \cos\theta \\
\operatorname{sen}\theta \cos \theta=\frac{1}{2}\operatorname{sen}2\theta
\end{gather}
\]
e podemos reescrever
\[
P_{Pp}=\frac{P}{2}\operatorname{sen}2\theta
\]
esta componente é a responsável pela força de atrito Fat1.A componente normal é transmitida pela barra até a parede, esta componente pode ser novamente decomposta em duas, uma componente normal à parede (PNn), em módulo (Figura 2-C)
\[
P_{Nn}=P_{N}\cos \theta =P\operatorname{sen}\theta \cos \theta=\frac{P}{2}\operatorname{sen}2\theta
\]
esta componente é a responsável pela reação normal FN2. E outra componente
paralela à parede (PNp), em módulo
\[
P_{Np}=P_{N}\operatorname{sen}\theta =P\operatorname{sen}\theta\operatorname{sen}\theta =P\operatorname{sen}^{2}\theta
\]
esta componente é a responsável pela força de atrito Fat2.
Para que a barra permaneça em equilíbrio devemos impor as seguintes condições
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\sum {\mathbf{F}}=0} \tag{I-a}
\end{gather}
\]
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\sum {\mathbf{N}}=0} \tag{I-b}
\end{gather}
\]
Desenhando as forças num sistema de eixos coordenados (Figura 3), e aplicando a condição de (I-a)
\[
\begin{gather}
{\mathbf{F}}_{N2}-{\mathbf{F}}_{at1}+{\mathbf{F}}_{at2}+{\mathbf{F}}_{N1}-\mathbf{P}=0\\
F_{N2}\;\mathbf{j}-F_{at1}\;\mathbf{j}+F_{at2}\;\mathbf{k}+F_{N1}\;\mathbf{k}-P\;\mathbf{k}=0
\end{gather}
\]
onde j e k são os vetores unitários nas direções y e z, separando as componentes
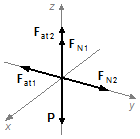
Figura 3
- Direção j:
\[
F_{N2}-F_{at1}=0
\]
o módulo da força de atrito é dado por
\[ \bbox[#99CCFF,10px]
{F_{at}=\mu N}
\]
então reescrevemos para a força N = FN1
\[
\begin{gather}
F_{N2}-\mu_{1}F_{N1}=0 \tag{II}
\end{gather}
\]
- Direção k:
\[
F_{at2}+F_{N1}-P=0
\]
então reescrevemos para a força N = FN2
\[
\begin{gather}
\mu_{2}F_{N2}+F_{N1}-P=0 \tag{III}
\end{gather}
\]
Os torques das forças serão calculados em relação à metade da barra (onde está aplicada a força peso
P).O torque de uma força é dado por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\mathbf{N}=\mathbf{r}\times{\mathbf{F}}} \tag{IV}
\end{gather}
\]
No cálculo do torque devido à força peso (P), a força (F) é a própria força peso, como o
torque está sendo calculado em relação ao próprio centro da barra onde está aplicada a força peso, a
distância será nula (r = 0),e portanto, o torque será
\[
{\mathbf{N}}_{P}=0
\]
em módulo
\[
\begin{gather}
N_{P}=0 \tag{V}
\end{gather}
\]
No cálculo do torque da força de atrito da barra com o chão o vetor posição (r1) vai do
centro da barra até o chão e a força (F) é representada pela força de atrito
(Fat1), Figura 4-A. Aplicando a expressão (IV)
\[
{\mathbf{N}}_{at1}={\mathbf{r}}_{1}\times{\mathbf{F}}_{at1}
\]
Adota-se um sistema de eixos cartesianos x, y e z onde i, j e k são
os vetores unitários daquelas direções. O vetor posição do centro da barra (r1) pode ser
decomposto nas direções j e −k, suas componentes podem ser escritas como
\( {\mathbf{r}}_{1y}=r_{1}\operatorname{sen}\theta\;\mathbf{j} \)
e
\( {\mathbf{r}}_{1z}=-r_{1}\cos \theta\;\mathbf{k} \)
(Figura 4-B), e o vetor força de atrito só possui componente na direção −j, então
\( {\mathbf{F}}_{at1}=-F_{at1}\;\mathbf{j} \)
\[
\begin{gather}
{\mathbf{r}}_{1}\times{\mathbf{F}}_{at1}=\left|
\begin{matrix}
\mathbf{i}&\mathbf{j} &\mathbf{k}\\
\;0 &r_{1}\operatorname{sen}\theta
&-r_{1}\cos \theta
\\
0 &-F_{at1} &0\;
\end{matrix}\right|\\[5pt]
{\mathbf{r}}_{1}\times{\mathbf{F}}_{at1}=[r_{1}\operatorname{sen}\theta .0-(-r_{1}\cos \theta).(-F_{at1})]\;\mathbf{i}-[0.0-(-r_{1}\cos\theta).0]\;\mathbf{j}+[0.(-F_{at1})-r_{1}\operatorname{sen}\theta .0]\;\mathbf{k}\\[5pt]
{\mathbf{r}}_{1}\times{\mathbf{F}}_{at1}=-F_{at1}r_{1}\cos\theta \;\mathbf{i}
\end{gather}
\]
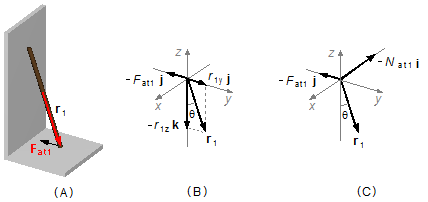
O torque só possui componente na direção i (Figura 4-C)
\[
\begin{gather}
{\mathbf{N}}_{at1}=-F_{at1}r_{1}\cos\theta \;\mathbf{i} \tag{VI}
\end{gather}
\]
No cálculo do torque da reação normal ao chão temos o vetor posição (r1) e a força
(F) é representada pela reação normal (FN1), Figura 5-A. Aplicando a
expressão (IV)
\[
{\mathbf{N}}_{N1}={\mathbf{r}}_{1}\times{\mathbf{F}}_{N1}
\]
O vetor posição do centro da barra (r1) é o mesmo usado acima (Figuras 4-A e 5-A) e pode
ser decomposto da mesma forma (Figura 5-B), e o vetor força normal só possui componente na direção k,
então
\( {\mathbf{F}}_{N1}=F_{N1}\;\mathbf{k} \)
\[
\begin{gather}
{\mathbf{r}}_{1}\times{\mathbf{F}}_{N1}=\left|
\begin{matrix}
\mathbf{i} &\mathbf{j} &\mathbf{k}\\
\;0 &r_{1}\operatorname{sen}\theta
&-r_{1}\cos \theta
\\
0 &0 &F_{N1}
\end{matrix}\right|\\[5pt]
{\mathbf{r}}_{1}\times{\mathbf{F}}_{N1}=[r_{1}\operatorname{sen}\theta.F_{N1}-(-r_{1}\cos \theta).0]\;\mathbf{i}-[0.F_{N1}-(-r_{1}\cos \theta).0]\;\mathbf{j}+(0.0-r_{1}\operatorname{sen}\theta.0)\;\mathbf{k}\\[5pt]
{\mathbf{r}}_{1}\times{\mathbf{F}}_{N1}=F_{N1}r_{1}\operatorname{sen}\theta\;\mathbf{i}
\end{gather}
\]
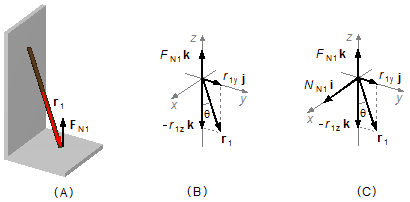
O torque só possui componente na direção i (Figura 5-C)
\[
\begin{gather}
{\mathbf{N}}_{N1}=F_{N1}r_{1}\operatorname{sen}\theta\;\mathbf{i} \tag{VII}
\end{gather}
\]
No cálculo do torque da força de atrito da barra com a parede o vetor posição (r2) vai do
centro da barra até a parede e a força (F) é representada pela força de atrito
(Fat2), Figura 6-A. Aplicando a expressão (IV)
\[
{\mathbf{N}}_{at2}={\mathbf{r}}_{2}\times{\mathbf{F}}_{at2}
\]
O vetor posição do centro da barra (r2) pode ser decomposto nas direções −j e
k, portanto, suas componentes podem ser escritas como
\( {\mathbf{r}}_{2y}=-r_{2}\operatorname{sen}\theta\;\mathbf{j} \)
e
\( {\mathbf{r}}_{2z}=r_{2}\cos \theta\;\mathbf{k} \)
(Figura 6-B), e o vetor força de atrito só possui componente na direção k, então
\( {\mathbf{F}}_{at2}=F_{at1}\;\mathbf{k} \)
\[
\begin{gather}
{\mathbf{r}}_{2}\times{\mathbf{F}}_{at2}=\left|
\begin{matrix}
\mathbf{i} &\mathbf{j} &\mathbf{k}\\
\;0 &-r_{2}\operatorname{sen}\theta
&r_{2}\cos \theta
\\
0 &0 &F_{at2}
\end{matrix}\right|\\[5pt]
{\mathbf{r}}_{2}\times{\mathbf{F}}_{at2}=[-r_{2}\operatorname{sen}\theta . F_{at2}-r_{2}\cos \theta .0]\;\mathbf{i}-[0.F_{at2}-r_{2}\cos \theta .0]\;\mathbf{j}+[\;0.0-(-r_{2}\operatorname{sen}\theta).0]\;\mathbf{k}\\{\mathbf{r}}_{2}\times{\mathbf{F}}_{at2}=-F_{at2}r_{2}\operatorname{sen}\theta\;\mathbf{i}[5pt]
\end{gather}
\]
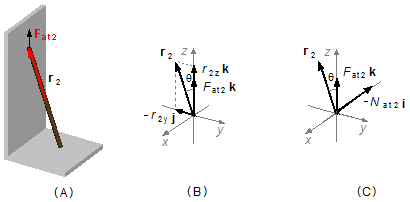
O torque só possui componente na direção −i (Figura 6-C)
\[
\begin{gather}
{\mathbf{N}}_{at2}=-F_{at2}r_{2}\operatorname{sen}\theta\;\mathbf{i} \tag{VIII}
\end{gather}
\]
No cálculo do torque da reação normal à parede o vetor posição (r2) vai do centro da barra
até parede e a força (F) é representada pela força normal (FN2), conforme
Figura 7-A. Aplicando a expressão (IV)
\[
{\mathbf{N}}_{N2}={\mathbf{r}}_{2}\times{\mathbf{F}}_{N2}
\]
O vetor posição do centro da barra (r2) é o mesmo usado acima (Figuras 6-A e 7-A) e pode
ser decomposto da mesma forma (Figura 7-B), e o vetor força normal só possui componente na direção j,
então
\( {\mathbf{F}}_{N2}=F_{N2}\;\mathbf{j} \)
\[
\begin{gather}
{\mathbf{r}}_{2}\times{\mathbf{F}}_{N2}=\left|
\begin{matrix}
\mathbf{i} &\mathbf{j} &\mathbf{k}\\
\;0 &-r_{2}\operatorname{sen}\theta &r_{2}\cos \theta\\
0 &F_{N2} &0
\end{matrix}\right|\\[5pt]
{\mathbf{r}}_{2}\times{\mathbf{F}}_{N2}=[-r_{2}\operatorname{sen}\theta .0-r_{2}\cos \theta .F_{N2}]\;\mathbf{i}-[0.0-r_{2}\cos\theta .0]\;\mathbf{j}+[0.F_{N2}-(-r_{2}\operatorname{sen}\theta).0]\;\mathbf{k}\\[5pt]
{\mathbf{r}}_{2}\times{\mathbf{F}}_{N2}=-F_{N2}r_{2}\operatorname{sen}\theta\;\mathbf{i}
\end{gather}
\]
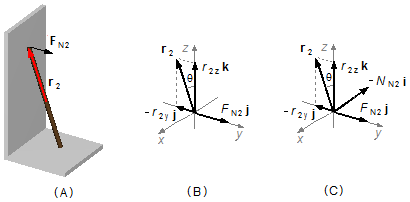
O torque só possui componente na direção −i (Figura 7-C)
\[
\begin{gather}
{\mathbf{N}}_{N2}=-F_{N2}r_{2}\operatorname{sen}\theta\;\mathbf{i} \tag{IX}
\end{gather}
\]
Para que o sistema permaneça em equilíbrio aplicamos a condição de (I-b)
\[
\begin{gather}
{\mathbf{N}}_{P}+{\mathbf{N}}_{at1}+{\mathbf{N}}_{N1}+{\mathbf{N}}_{at2}+{\mathbf{N}}_{N2}=0 \tag{X}
\end{gather}
\]
substituindo as expressões (V), (VI), (VII), (VIII) e (XI) na expressão (X)
\[
0-F_{at1}r_{1}\cos \theta\;\mathbf{i}+F_{N1}r_{1}\operatorname{sen}\theta\;\mathbf{i}-F_{at2}r_{2}\operatorname{sen}\theta\;\mathbf{i}-F_{N2}r_{2}\operatorname{sen}\theta\;\mathbf{i}=0
\]
como o sistema de referência foi adotado no meio da barra, se esta possui um comprimento L os vetores
r1 e r2 possuem módulos igual a metade do comprimento da barra
\( \left(r_{1}=r_{2}=\frac{L}{2}\right) \),
e como o torque só possui componentes na direção i
\[
\begin{gather}
\frac{L}{2}F_{at1}\cos \theta+\frac{L}{2}F_{N1}\operatorname{sen}\theta-\frac{L}{2}F_{at2}\operatorname{sen}\theta-\frac{L}{2}F_{N2}\cos \theta=0\\[5pt]
\frac{L}{2}\left(-F_{at1}\cos \theta+F_{N1}\operatorname{sen}\theta-F_{at2}\operatorname{sen}\theta -F_{N2}\cos \theta\right)=0\\[5pt]
-F_{at1}\cos \theta +F_{N1}\operatorname{sen}\theta-F_{at2}\operatorname{sen}\theta -F_{N2}\cos \theta=0\\[5pt]
F_{N1}\operatorname{sen}\theta-F_{at2}\operatorname{sen}\theta =F_{at1}\cos \theta+F_{N2}\cos \theta \\[5pt]
\operatorname{sen}\theta\left(F_{N1}-F_{at2}\right)=\cos \theta\left(F_{at1}+F_{N2}\right)\\[5pt]
\frac{\operatorname{sen}\theta}{\cos \theta}=\frac{F_{at1}+F_{N2}}{F_{N1}-F_{at2}} \tag{XI}
\end{gather}
\]
sendo
\( \operatorname{tg}\theta =\frac{\operatorname{sen}\theta}{\cos \theta} \)
e usando as expressões para Fat1 e Fat2 acima
\[
\begin{gather}
\operatorname{tg}\theta =\frac{\mu_{1}F_{N1}+F_{N2}}{F_{N1}-\mu_{2}F_{N2}} \tag{XII}
\end{gather}
\]
da expressão (II)
\[
\begin{gather}
F_{N2}=\mu_{1}F_{N1} \tag{XIII}
\end{gather}
\]
substituindo a expressão (XIII) na expressão (XII)
\[
\begin{gather}
\operatorname{tg}\theta =\frac{\mu_{1}F_{N1}+\mu_{1}F_{N1}}{F_{N1}-\mu_{2}\mu_{1}F_{N1}}\\
\operatorname{tg}\theta=\frac{F_{N1}}{F_{N1}}\frac{(\mu_{1}+\mu_{1})}{(1-\mu_{1}\mu_{2})}
\end{gather}
\]
\[ \bbox[#FFCCCC,10px]
{\theta =\operatorname{arctg}\left(\frac{2\mu_{1}}{1-\mu_{1}\mu_{2}}\right)}
\]
b) Usando o resultado do item anterior fazendo a seguinte substituição μ1 = μ2 = μ
\[ \bbox[#FFCCCC,10px]
{\theta =\operatorname{arctg}\left(\frac{2\mu }{1-\mu ^{2}}\right)}
\]
c) Usando o resultado do item (a) fazendo a substituição μ1 = μ e μ2 = 0
\[
\theta =\operatorname{arctg}\left(\frac{2\mu }{1-\mu .0}\right)
\]
\[ \bbox[#FFCCCC,10px]
{\theta =\operatorname{arctg}2\mu}
\]
publicidade

Fisicaexe - Exercícios Resolvidos de Física de Elcio Brandani Mondadori está licenciado com uma Licença Creative Commons - Atribuição-NãoComercial-Compartilha Igual 4.0 Internacional .