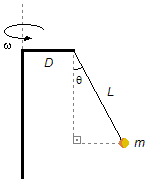
Um corpo de massa m está suspenso por uma corda, inextensível e de massa desprezível, na ponta de
um suporte em forma de L invertido verticalmente, com a barra horizontal medindo D,
conforme figura. Este conjunto gira em torno do eixo vertical do suporte. Sendo L o comprimento
da corda e g a aceleração local da gravidade, determine a velocidade angular com que o conjunto
deve girar para que o ângulo θ que a corda forma com a vertical seja 90°.
Dados do problema:
- Massa do corpo: m;
- Comprimento da corda: L;
- Comprimento do suporte horizontal: D;
- Aceleração local da gravidade: g.
Esquema do problema:
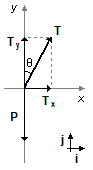
A massa m está sob a ação da força peso (P) e da tração (T) na corda. Como o corpo
realiza um movimento circular ele está sob a ação da aceleração centrípeta (acp),
apontada radialmente para o centro da trajetória. O ângulo entre a tração na corda e a vertical passando
pelo corpo será θ, mesmo ângulo que temos entre a corda L e a vertical, pois estes ângulos
são alternos internos.
Solução:
Desenhando as forças que atuam no corpo num sistema de eixos coordenados (Figura 2) e aplicando a
2.ª Lei de Newton
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\mathbf F=m\mathbf a}
\end{gather}
\]
\[
\begin{gather}
\mathbf T-\mathbf P=m\mathbf a \\[5pt]
\mathbf T_x+\mathbf T_y-m\mathbf g=m\mathbf a \\[5pt]
T_x\;\mathbf i+T_y\;\mathbf j-mg\;\mathbf j=m(a_x\;\mathbf i+a_y\;\mathbf j) \\[5pt]
T_x\;\mathbf i+T_y\;\mathbf j-mg\;\mathbf j=ma_x\;\mathbf i+ma_y\;\mathbf j
\end{gather}
\]
onde
Tx e
ax são as componentes da tração e da aceleração na direção
i e
Ty e
ay são as componentes da tração e da aceleração na direção
j.
Separando as componentes:
\[
\begin{gather}
T_x=ma_x \tag{I}
\end{gather}
\]
o módulo da componente Tx é dado por
\[
\begin{gather}
T_x=T\operatorname{sen}\theta \tag{II}
\end{gather}
\]
e a componente da aceleração ax é a aceleração centrípeta acp responsável
pelo corpo fazer a curva, substituindo esta aceleração e a expressão (II) na expressão (I)
\[
\begin{gather}
T\operatorname{sen}\theta=ma_{cp} \tag{III}
\end{gather}
\]
\[
\begin{gather}
T_y-mg=ma_y \tag{IV}
\end{gather}
\]
o módulo da componente Ty é dado por
\[
\begin{gather}
T_y=T\cos\theta \tag{V}
\end{gather}
\]
com não existe movimento nesta direção a componente da aceleração é nula (ay = 0),
substituindo esta aceleração e a expressão (V) na expressão (IV)
\[
\begin{gather}
T\cos\theta -mg=m\times 0 \\[5pt]
T\cos\theta -mg=0 \\[5pt]
T\cos\theta=mg \tag{VI}
\end{gather}
\]
Dividindo a expressão (III) pela expressão (VI)
\[
\begin{gather}
\frac{T\operatorname{sen}\theta}{T\cos\theta}=\frac{ma_{cp}}{mg} \\[5pt]
\operatorname{tg}\theta=\frac{a_{cp}}{g} \\[5pt]
a_{cp}=g\operatorname{tg}\theta \tag{VII}
\end{gather}
\]
O módulo da aceleração centrípeta é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{a_{cp}=\frac{v^2}{r}} \tag{VIII}
\end{gather}
\]
a velocidade tangencial v é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v=\omega r} \tag{IX}
\end{gather}
\]
substituindo a expressão (IX) na expressão (VIII)
\[
\begin{gather}
a_{cp}=\frac{(\omega r)^2}{r} \\[5pt]
a_{cp}=\frac{\omega^2r^{\cancel{2}}}{\cancel{r}} \\[5pt]
a_{cp}=\omega ^2r \tag{X}
\end{gather}
\]
onde r representa a distância do corpo ao eixo de rotação dado pela soma do comprimento do suporte
horizontal D e do deslocamento da massa R provocado pela rotação (Figura 3)
\[
\begin{gather}
r=D+R \tag{XI}
\end{gather}
\]
Da Figura 3 podemos escrever a distância
R do deslocamento corpo como
\[
\begin{gather}
\operatorname{sen}\theta=\frac{R}{L} \\[5pt]
R=L\operatorname{sen}\theta \tag{XII}
\end{gather}
\]
substituindo a expressão (XII) na expressão (XI)
\[
\begin{gather}
r=D+L\operatorname{sen}\theta \tag{XIII}
\end{gather}
\]
substituindo a expressão (XIII) na expressão (X) e esta na expressão (VII)
\[
\begin{gather}
\omega^2(D+L\operatorname{sen}\theta)=g\operatorname{tg}\theta \\[5pt]
\omega^2=\frac{g\operatorname{tg}\theta}{(D+L\operatorname{sen}\theta )} \\[5pt]
\omega=\left[\frac{g\operatorname{tg}\theta}{D+L\operatorname{sen}\theta}\right]^{\frac{1}{2}} \tag{XIV}
\end{gather}
\]
Queremos saber a velocidade angular para a qual o ângulo será
\( \theta=90°=\frac{\pi}{2} \),
para este ângulo o valor da tangente da expressão (XIV) tende ao infinito
\[
\begin{gather}
\lim _{\theta \to \frac{\pi}{2}}\omega =\lim_{\theta \to \frac{\pi}{2}}\left[\frac{g\operatorname{tg}\theta}{D+L\operatorname{sen}\theta}\right]^{\frac{1}{2}}=\left[\frac{g\operatorname{tg}\frac{\pi}{2}}{D+L\operatorname{sen}\frac{\pi}{2}}\right]^{\frac{1}{2}}=\left[\frac{g.\infty}{D+L.1}\right]^{\frac{1}{2}}=\infty
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{v=\infty}
\end{gather}
\]
Observação: Na prática o ângulo nunca chega a 90°, pois para isso seria preciso uma velocidade
angular infinita, por mais rápido que se gire o corpo maior será o ângulo que ele forma com a vertical, no
entanto nunca ficará perfeitamente horizontal.