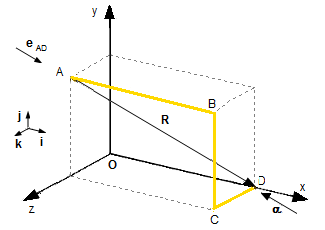
A haste ABCD ilustrada, gira apoiada em duas articulações esféricas em A e D, no sentido
horário, quando a mesma é observada do ponto de vista da articulação A. A velocidade angular da barra,
no instante considerado, é igual a 12 rad/s, e diminui de forma constante, à razão de 3 rad/s2.
Calcule:
a) O vetor velocidade angular, em rad/s;
b) O vetor aceleração angular, em rad/s2;
c) O vetor velocidade do ponto B, em m/s;
d) O vetor aceleração do ponto B, em m/s2.

">
Dados do problema:
- velocidade angular: \( \omega=12\;\text{rad/s} \);
- aceleração angular: \( \alpha=-3\;\text{rad/s} \).
Esquema do problema:
Visto do ponto A o sistema gira no sentido horário com velocidade angular ω e como sua aceleração
angular α é negativa ela está no sentido anti-horário (Figura 1).
Solução:
Em primeiro lugar vamos converter as dimensões da barra dadas em centímetros para metros usado no
Sistema Internacional (S.I.)
\[
\begin{gather}
\overline{AB}=28\;\cancel{\text{cm}}\times\frac{1\;\text{m}}{10^2\;\cancel{\text{cm}}}=28\times 10^{-2}\;\text{m}=0,28\;\text{m} \\[5pt]
\overline{BC}=18\;\cancel{\text{cm}}\times\frac{1\;\text{m}}{10^2\;\cancel{\text{cm}}}=18\times 10^{-2}\;\text{m}=0,18\;\text{m} \\[5pt]
\overline{CD}=12\;\cancel{\text{cm}}\times\frac{1\;\text{m}}{10^2\;\cancel{\text{cm}}}=12\times 10^{-2}\;\text{m}=0,12\;\text{m}
\end{gather}
\]
a) Vamos encontrar o vetor unitário
eAD na direção do eixo
AD representado pelo
vetor
R em torno do qual o sistema gira em função dos vetores unitários
i,
j,
k. O
vetor
r' vai da origem até o ponto
A, que tem as coordenadas
\( (x_A, y_A, z_A)=(0; 0,18; 0,12) \),
o vetor será
\( \mathbf{r'}=0,18\;\mathbf j+0,12\;\mathbf k \).
O vetor
r vai da origem até o ponto
D que tem as coordenadas
\( (x_D, y_D, z_D)=(0,28; 0; 0) \),
o vetor será
\( \mathbf r=0,28\;\mathbf i \).
O vetor
R será (Figura 2)
\[
\begin{gather}
\mathbf R=\mathbf r-\mathbf{r'} \\[5pt]
\mathbf R=0,28\;\mathbf i-(0,18\;\mathbf j+0,12\;\mathbf k) \\[5pt]
\mathbf R=0,28\;\mathbf i-0,18\;\mathbf j-0,12\;\mathbf k
\end{gather}
\]
o vetor unitário eAD será
\[
\begin{gather}
\mathbf e_{AD}=\frac{\mathbf R}{|\mathbf R|} \\[5pt]
\mathbf e_{AD}=\frac{0,28\;\mathbf i-0,18\;\mathbf j-0,12\;\mathbf k}{\sqrt{\;0,28^2+(-0,18^2)+(-0,12^2)\;}} \\[5pt]
\mathbf e_{AD}=\frac{0,28\;\mathbf i-0,18\;\mathbf j-0,12\;\mathbf k}{\sqrt{\;0,0784+0,0324+0,0144\;}} \\[5pt]
\mathbf e_{AD}=\frac{0,28\;\mathbf i-0,18\;\mathbf j-0,12\;\mathbf k}{\sqrt{\;0,1252\;}} \\[5pt]
\mathbf e_{AD}=\frac{0,28\;\mathbf i-0,18\;\mathbf j-0,12\;\mathbf k}{0,3538} \\[5pt]
\mathbf e_{AD}=0,79\;\mathbf i-0,51\;\mathbf j-0,34\;\mathbf k
\end{gather}
\]
O vetor velocidade angular será (Figura 3)
\[
\begin{gather}
\bbox[#99CCFF,10px]
{{\boldsymbol\omega}=\omega\;\mathbf e_{AD}}
\end{gather}
\]
\[
\begin{gather}
\boldsymbol{\omega}=12.(0,79\;\mathbf i-0,51\;\mathbf j-0,34\;\mathbf k)
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\boldsymbol{\omega}=9,48\;\mathbf i-6,12\;\mathbf j-4,08\;\mathbf k} \tag{I}
\end{gather}
\]
b) O vetor aceleração angular será (Figura 4)
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\boldsymbol{\alpha}=\alpha\;\mathbf e_{AD}}
\end{gather}
\]
\[
\begin{gather}
\boldsymbol{\alpha}=-3\times(0,79\;\mathbf i-0,51\;\mathbf j-0,34\;\mathbf k)
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\boldsymbol{\alpha}=-2,37\;\mathbf i+1,53\;\mathbf j+1,02\;\mathbf k} \tag{II}
\end{gather}
\]
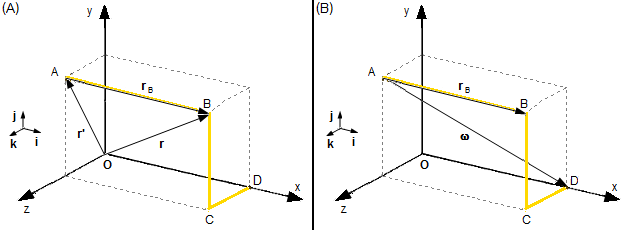
c) O vetor r' é o mesmo usado no item (a), o vetor r vai da origem até o ponto B que tem as
coordenadas
\( (x_B, y_B, z_B)=(0,28; 0,18; 0,12) \),
o vetor será
\( \mathbf r=0,28\mathbf i+0,18\;\mathbf j+0,12\;\mathbf k \).
O vetor rB que localiza o ponto B, onde queremos calcular o vetor velocidade, em relação
ao ponto A será dado por (Figura 5-A)
\[
\begin{gather}
\mathbf r_B=\mathbf r-\mathbf{{r'}} \\[5pt]
\mathbf r_B=0,28\mathbf i+0,18\;\mathbf j+0,12\;\mathbf k-(0,18\;\mathbf j+0,12\;\mathbf k) \\[5pt]
\mathbf r_B=0,28\mathbf i+0,18\;\mathbf j+0,12\;\mathbf k-0,18\;\mathbf j-0,12\;\mathbf k \\[5pt]
\mathbf r_B=0,28\mathbf i \tag{III}
\end{gather}
\]
Usando a expressão (I) o vetor velocidade do ponto B será (Figura 5-B)
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\mathbf v=\boldsymbol{\omega}\times\mathbf r_B}
\end{gather}
\]
\[
\begin{gather}
\mathbf v=\begin{bmatrix}
\mathbf i &\mathbf j &\mathbf k \\
\;9,48 &-6,12 &-4,08 \\
\;0,28 &0 &0
\end{bmatrix} \\[5pt]
\mathbf v=[(-6,12)\times 0-(-4,08)\times 0]\;\mathbf i-[9,48\times 0-(-4,08)\times 0,28]\;\mathbf j+[9,48\times 0-(-6,12)\times 0,28]\;\mathbf k \\[5pt]
\mathbf v=[0-0]\;\mathbf i-[0-(-1,14)]\;\mathbf j+[0-(-1,71)]\;\mathbf k \\[5pt]
\mathbf v=0\;\mathbf i-[1,14]\;\mathbf j+[1,71]\;\mathbf k
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\mathbf v=-1,14\;\mathbf j+1,71\;\mathbf k} \tag{IV}
\end{gather}
\]
d) Usando o vetor
rB do item (c) e a expressão (II), o vetor aceleração no ponto
B será (Figura 6)
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\mathbf a=\boldsymbol{\omega}\times(\boldsymbol{\omega}\times\mathbf r_B)+\boldsymbol{\alpha}\times\mathbf r_B}
\end{gather}
\]
O termo entre parênteses
\( (\boldsymbol{\omega}\times\mathbf r_B) \)
é o vetor velocidade
v encontrado no item (c), assim podemos reescrever
\[
\begin{gather}
\mathbf a=\boldsymbol{\omega}\times\mathbf v+\boldsymbol{\alpha}\times\mathbf r_B \tag{V}
\end{gather}
\]
Calculando separadamente os produtos vetoriais
\[
\begin{gather}
\boldsymbol{\omega}\times\mathbf v=\begin{bmatrix}
\mathbf i &\mathbf j &\mathbf k \\
9,48 &-6,12 &-4,08 \\
0 &-1,14 &1,71
\end{bmatrix} \\[5pt]
\boldsymbol{\omega}\times\mathbf v=[(-6,12)\times 1,71-(-4,08)\times(-1,14)]\;\mathbf i\mathrm{-} \\[5pt]
\qquad\qquad\qquad -[9,48\times 1,71-(-4,08)\times 0]\;\mathbf j+[9,48\times(-1,14)-(-6,12)\times 0]\;\mathbf k \\[5pt]
\boldsymbol{\omega}\times\mathbf v=[-10,47-4,65]\;\mathbf i-[16,21-0]\;\mathbf j+[-10,81-0]\;\mathbf k \\[5pt]
\boldsymbol{\omega}\times\mathbf v=-15,12\;\mathbf i-16,21\;\mathbf j-10,81\;\mathbf k \tag{VI}
\end{gather}
\]
\[
\begin{gather}
\boldsymbol{\alpha}\times\mathbf r_B=\begin{bmatrix}
\mathbf i &\mathbf j &\mathbf k \\[5pt]
\;-2,37 &1,53 &1,02 \\[5pt]
0,28 &0 &0
\end{bmatrix} \\[5pt]
\boldsymbol{\alpha}\times\mathbf r_B=[1,53\times 0-1,02\times 0]\;\mathbf i-[(-2,37)\times 0-1,02\times 0,28]\;\mathbf j+[(-2,37)\times 0-1,53\times 0,28]\;\mathbf k \\[5pt]
\boldsymbol{\alpha}\times\mathbf r_B=[0-0]\;\mathbf i-[0-0,29]\;\mathbf j+[0-0,43]\;\mathbf k \\[5pt]
\boldsymbol{\alpha}\times\mathbf r_B=0,29\;\mathbf j-0,43\;\mathbf k \tag{VII}
\end{gather}
\]
substituindo as expressões (VI) e (VII) na expressão (V) o vetor aceleração será
\[
\begin{gather}
\mathbf a=(-15,12\;\mathbf i-16,21\;\mathbf j-10,81\;\mathbf k)+(0,29\;\mathbf j-0,43\;\mathbf{\;})\mathbf k
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\mathbf a=-15,12\;\mathbf i-15,92\;\mathbf j+11,24\;\mathbf k}
\end{gather}
\]