Obtenha a equação para o cálculo da velocidade e da aceleração de um corpo, que se move em um plano, em
coordenadas polares.
Solução:
O vetor posição em coordenadas polares é dado por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\mathbf r=r\;\mathbf e_r} \tag{I}
\end{gather}
\]
Para encontrarmos o vetor velocidade (v) devemos derivar o vetor posição em relação ao tempo. Em
coordenadas polares os vetores unitários, er e
eθ, mudam de posição com o tempo, eles são funções do tempo.
Lembrando do
Cálculo Integral e Diferencial, a regra da derivada do produto é dada por
\[
\begin{gather}
\frac{d(fg)}{dt}=\frac{df}{dt}g+f\frac{dg}{dt}
\end{gather}
\]
\[
\begin{gather}
\frac{d\mathbf r}{dt}=\frac{dr}{dt}\;\mathbf e_r+r\frac{d\mathbf e_r}{dt} \tag{II}
\end{gather}
\]
O vetor unitário er é função do ângulo θ, para encontrarmos
\( \frac{d\mathbf e_r}{dt} \)
devemos aplicar a regra da cadeia.
Lembrando do
Cálculo Integral e Diferencial, a regra da cadeia é dada por
\[
\begin{gather}
\frac{df[g(t)]}{dt}=\frac{df}{dg}\frac{dg}{dt}
\end{gather}
\]
\[
\begin{gather}
\frac{d\mathbf e_r}{dt}=\frac{d\mathbf e_r}{d\theta}\frac{d\theta}{dt} \tag{III}
\end{gather}
\]
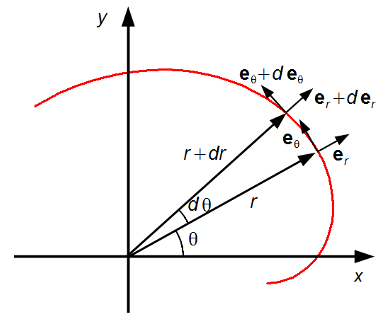
Quando a posição (r) se desloca para a posição r+dr, temos uma variação
infinitesimal do ângulo (dθ), Figura 1.
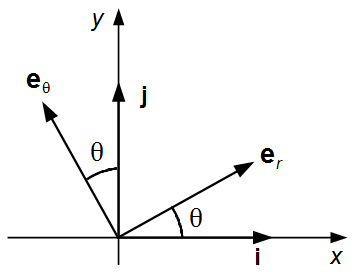
Desenhando os vetores unitários,
er e
eθ das
coordenadas polares, em um sistema de eixos-
xy, podemos encontrar suas componentes em termos dos
vetores unitário
i e
j de coordenadas cartesianas (Figura 2).
\[
\begin{gather}
{\mathbf e}_r=\cos\theta\;\mathbf i+\operatorname{sen}\theta\;\mathbf j \tag{IV-a} \\[5pt]
{\mathbf e}_{\theta}=-\operatorname{sen}\theta \;\mathbf i+\cos \theta\;\mathbf j \tag{IV-b}
\end{gather}
\]
Derivando a equação (IV-a) em função de
θ
\[
\begin{gather}
\frac{d{\mathbf e}_r}{d\theta}=\underbrace{-\operatorname{sen}\theta\;\mathbf i+\cos \theta\;\mathbf j}_{{\mathbf e}_{\theta}}
\end{gather}
\]
\[
\begin{gather}
\frac{d\mathbf e_r}{d\theta}=\mathbf e_{\theta} \tag{V}
\end{gather}
\]
substituindo a equação (V) na equação (III)
\[
\begin{gather}
\frac{d\mathbf e_r}{dt}=\frac{d\theta}{dt}\;{\mathbf e}_{\theta} \tag{VI}
\end{gather}
\]
substituindo a equação (VI) na equação (II), temos a velocidade
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\frac{d\mathbf r}{dt}=\frac{dr}{dt}\;{\mathbf e}_r+r\frac{d\theta}{dt}\;{\mathbf e}_{\theta}} \tag{VII-a}
\end{gather}
\]
ou usando a seguinte notação
\( \frac{d\mathbf r}{dt}=\dot{\mathbf r} \),
\( \frac{dr}{dt}=\dot{r} \)
e
\( \frac{d\theta}{dt}=\dot{\theta} \)
também podemos escrever
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\dot{\mathbf r}=\dot{r}\;{\mathbf e}_r+r\dot{\theta}\;{\mathbf e}_{\theta}} \tag{VII-b}
\end{gather}
\]
ou usando a seguinte notação
\( \dot{\mathbf r}=\mathbf v \),
\( \dot{r}=v_r \)
e
\( \dot{\theta}=\omega \)
também podemos escrever
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\mathbf v=v_r\;{\mathbf e}_r+r\omega\;{\mathbf e}_{\theta}} \tag{VII-c}
\end{gather}
\]
Para encontrarmos o vetor aceleração devemos derivar o vetor velocidade em relação ao tempo, vamos usar a
equação da velocidade na forma da equação (VII-a).
Lembrando do
Cálculo Integral e Diferencial, a derivada da soma é soma das derivadas
\[
\begin{gather}
\frac{d(f+g)}{dt}=\frac{df}{dt}+\frac{dg}{dt}
\end{gather}
\]
\[
\begin{gather}
\frac{d}{dt}\frac{d\mathbf r}{dt}=\frac{d}{dt}\left(\frac{dr}{dt}\;{\mathbf e}_r\right)+\frac{d}{dt}\left(r\frac{d\theta}{dt}\;{\mathbf e}_{\theta}\right) \tag{VIII}
\end{gather}
\]
O primeiro termo do lado direito da igualdade é o produto de duas funções e o segundo termo é o produto
de três funções, usando a regra da derivada do produto
\[
\begin{gather}
\frac{d^2\mathbf r}{dt^2}=\left(\frac{d^2r}{dt^2}\;{\mathbf e}_r+\frac{dr}{dt}\frac{d{\mathbf e}_r}{dt}\right)+\left(\frac{dr}{dt}\frac{d\theta}{dt}\;{\mathbf e}_{\theta}+r\frac{d^2\theta}{dt^2}\;{\mathbf e}_{\theta}+r\frac{d\theta}{dt}\frac{d{\mathbf e}_{\theta}}{dt}\right) \tag{IX}
\end{gather}
\]
O termo
\( \frac{d\mathbf e_r}{dt} \)
já foi encontrado na equação (VI).
O vetor unitário eθ é função do ângulo θ, para encontrarmos
\( \frac{d\mathbf e_{\theta}}{dt} \)
devemos aplicar a regra da cadeia.
\[
\begin{gather}
\frac{d\mathbf e_{\theta}}{dt}=\frac{d\mathbf e_{\theta}}{d\theta}\frac{d\theta}{dt} \tag{X}
\end{gather}
\]
Derivando a equação (IV-b) em função de θ
\[
\begin{gather}
\frac{d{\mathbf e}_{\theta}}{d\theta}=-\cos \theta \;\mathbf i-\operatorname{sen}\theta\;\mathbf j \\[5pt]
\frac{d{\mathbf e}_{\theta}}{d\theta}=-(\underbrace{\cos \theta\;\mathbf i+\operatorname{sen}\theta\;\mathbf j}_{{\mathbf e}_r})
\end{gather}
\]
\[
\begin{gather}
\frac{d\mathbf e_{\theta}}{d\theta}=-\mathbf e_r \tag{XI}
\end{gather}
\]
substituindo a equação (XI) na equação (X)
\[
\begin{gather}
\frac{d\mathbf e_{\theta}}{dt}=-{\frac{d\theta}{dt}}\mathbf e_r \tag{XII}
\end{gather}
\]
substituindo as equações (VI) e (XII) na equação (IX)
\[
\begin{gather}
\frac{d^2\mathbf r}{dt^2}=\left[\frac{d^2r}{dt^2}\;{\mathbf e}_r+\frac{dr}{dt}\left(\frac{d\theta}{dt}\;{\mathbf e}_{\theta}\right)\right]+\left[\frac{dr}{dt}\frac{d\theta}{dt}\;{\mathbf e}_{\theta}+r\frac{d^2\theta}{dt^2}\;{\mathbf e}_{\theta}-r\frac{d\theta}{dt}\left(\frac{d\theta}{dt}\mathbf e_r\right)\right] \\[5pt]
\frac{d^2\mathbf r}{dt^2}=\frac{d^2r}{dt^2}\;{\mathbf e}_r+\frac{dr}{dt}\frac{d\theta}{dt}\;{\mathbf e}_{\theta}+\frac{dr}{dt}\frac{d\theta}{dt}\;{\mathbf e}_{\theta}+r\frac{d^2\theta}{dt^2}\;{\mathbf e}_{\theta}-r\left(\frac{d\theta}{dt}\right)^2\mathbf e_r
\end{gather}
\]
Observação: Não confundir
\( \frac{d}{dt}\left(\frac{d\theta}{dt}\right)=\frac{d^2\theta}{dt^2} \)
que representa a derivada de segunda ordem de theta em relação ao tempo, com
\( \frac{d\theta}{dt}\left(\frac{d\theta}{dt}\right)=\left(\frac{d\theta}{dt}\right)^2 \)
que representa a derivada de primeira ordem de theta em relação ao tempo ao quadrado.
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\frac{d^2\mathbf r}{dt^2}=\left(\frac{d^2r}{dt^2}-r\left(\frac{d\theta}{dt}\right)^2\right)\mathbf e_r+\left(2\frac{dr}{dt}\frac{d\theta}{dt}+r\frac{d^2\theta}{dt^2}\right)\;{\mathbf e}_{\theta}}
\end{gather}
\]
ou usando a seguinte notação
\( \frac{d^2\mathbf r}{dt^2}=\ddot{\mathbf r} \),
\( \frac{dr}{dt}=\dot{r} \),
\( \frac{d^2r}{dt^2}=\ddot{r} \),
\( \frac{d\theta}{dt}=\dot{\theta} \)
e
\( \frac{d^2\theta}{dt^2}=\ddot{\theta} \)
também podemos escrever
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\ddot{\mathbf r}=\left(\ddot{r}-r{\dot{\theta}}^2\right)\mathbf e_r+\left(2\dot{r}\dot{\theta}+r\ddot{\theta}\right)\;{\mathbf e}_{\theta}}
\end{gather}
\]
ou usando a seguinte notação
\( \ddot{\mathbf r}=\mathbf a \)
também podemos escrever
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\mathbf a=\left(\ddot{r}-r{\dot{\theta}}^2\right)\mathbf e_r+\left(2\dot{r}\dot{\theta}+r\ddot{\theta}\right)\;{\mathbf e}_{\theta}}
\end{gather}
\]