Determine o torque que atua sobre um dipolo elétrico imerso num campo elétrico uniforme. Determine também a
energia potência deste dipolo.
Esquema do problema:
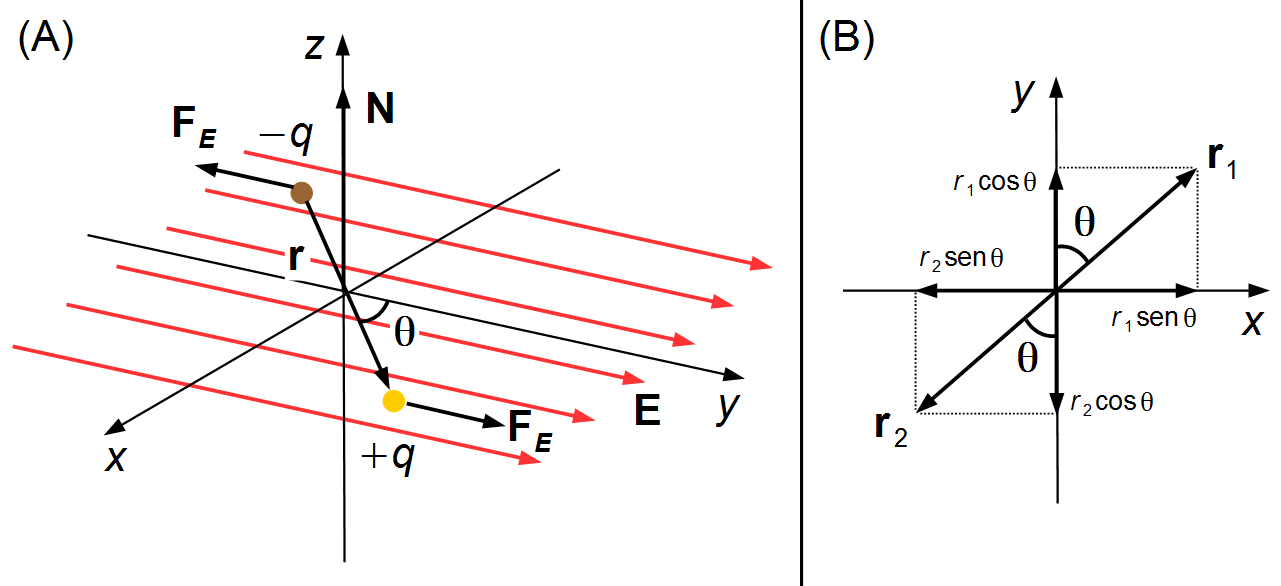
O dipolo é formado por cargas de mesmo valor e sinais contrários, +q e −q, colocadas em
um campo elétrico uniforme E. Na carga positiva atua uma força elétrica FE no
mesmo sentido do campo elétrico e na carga negativa atua uma força elétrica mesma intensidade e sentido
oposto ao campo elétrico (Figura 1-A).
Adotamos um sistema de referência xyz com origem no centro do dipolo, onde i, j e
k são os vetores unitários nas direções x, y e z (Figura 1-A)
O vetor r1 localiza a carga elétrica +q e
\( r_1=\frac{d}{2} \),
o vetor r2 localiza a carga elétrica −q e
\( r_2=\frac{d}{2} \).
O momento de dipolo é definido como apontando da carga negativa para a carga positiva dado pelo vetor
posição r (Figuras 1-A e 1-B)
\[
\begin{gather}
{\mathbf r}_1=r_1\operatorname{sen}\theta\;\mathbf i+r_1\cos\theta\;\mathbf j \\[5pt]
{\mathbf r}_1=\frac{d}{2}\operatorname{sen}\theta\;\mathbf i+\frac{d}{2}\cos\theta\;\mathbf j
\end{gather}
\]
\[
\begin{gather}
{\mathbf r}_2=-r_2\operatorname{sen}\theta\;\mathbf i-r_2\cos\theta\;\mathbf j \\[5pt]
{\mathbf r}_2=-{\frac{d}{2}}\operatorname{sen}\theta\;\mathbf i-\frac{d}{2}\cos\theta\;\mathbf j
\end{gather}
\]
\[
\begin{gather}
\mathbf r={\mathbf r}_1-{\mathbf r}_2\\[5pt]
\mathbf r=\frac{d}{2}\operatorname{sen}\theta\;\mathbf i+\frac{d}{2}\cos\theta\;\mathbf j-\left(-{\frac{d}{2}}\operatorname{sen}\theta\;\mathbf i-\frac{d}{2}\cos\theta\;\mathbf j\right) \\[5pt]
\mathbf r=\frac{d}{2}\operatorname{sen}\theta\;\mathbf i+\frac{d}{2}\cos\theta\;\mathbf j+\frac{d}{2}\operatorname{sen}\theta\;\mathbf i+\frac{d}{2}\cos\theta\;\mathbf j \\[5pt]
\mathbf r=d\operatorname{sen}\theta\;\mathbf i+d\cos\theta\;\mathbf j
\end{gather}
\]
Solução:
Sob a ação do par de forças elétricas este sistema gira sob a ação de um torque dado por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\mathbf N=\mathbf r\times{\mathbf F}}
\end{gather}
\]
a única força que atua no sistema é a força elétrica FE
\[
\begin{gather}
\mathbf N=\mathbf r\times{\mathbf F}_{\small E} \tag{I}
\end{gather}
\]
A força elétrica é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{{\mathbf F}_{\small E}=q\mathbf E} \tag{II}
\end{gather}
\]
substituindo a equação (II) na equação (I)
\[
\begin{gather}
\mathbf N=\mathbf r\times q\mathbf E \\[5pt]
\mathbf N=q\mathbf r\times{\mathbf E} \tag{III}
\end{gather}
\]
O momento de dipolo é dado por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\mathbf{p}=q\mathbf r} \tag{IV}
\end{gather}
\]
substituindo a equação (IV) na equação (III)
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\mathbf N=\mathbf{p}\times{\mathbf E}}
\end{gather}
\]
O campo elétrico está apontado na direção j
\[
\begin{gather}
\mathbf E=E\;\mathbf j
\end{gather}
\]
e o momento de dipolo pode ser escrito como
\[
\begin{gather}
\mathbf{p}=q(d\operatorname{sen}\theta\;\mathbf i+d\cos\theta\;\mathbf j)
\end{gather}
\]
o torque pode ser escrito como
\[
\begin{gather}
\mathbf{p}\times{\mathbf E}=\left[
\begin{matrix}
\;\mathbf i & \mathbf j & \mathbf k \;\\
\;qd\operatorname{sen}\theta & qd\cos\theta & 0 \;\\
\;0 & E &0 \;
\end{matrix}\right]= \\[5pt]
=\left[qd\cos\theta\times 0-0\times E\right]\;\mathbf i-\left[qd\operatorname{sen}\theta\times 0-0\times 0\right]\;\mathbf j+\left[qdE\operatorname{sen}\theta-0\times qdE\right]\;\mathbf k \\[5pt]
\mathbf{p}\times{\mathbf E}=qEd\operatorname{sen}\theta\;\mathbf k \tag{V}
\end{gather}
\]
\[
\mathbf N=qEd\operatorname{sen}\theta\;\mathbf k
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\mathbf N=pE\operatorname{sen}\theta\;\mathbf k}
\end{gather}
\]
O trabalho de uma força é dado por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{W=\int {\mathbf F}\cdot d\mathbf r}
\end{gather}
\]
para um corpo girando a força é dada pelo torque F = N e o deslocamento é dado pelo
deslocamento angular dr = dθ
\[
\begin{gather}
W=\int {\mathbf N}\cdot d\mathbf{\theta} \tag{VI}
\end{gather}
\]
o vetor deslocamento angular é dado por
\[
\begin{gather}
d\mathbf{\theta}=d\theta\;\mathbf k
\end{gather}
\]
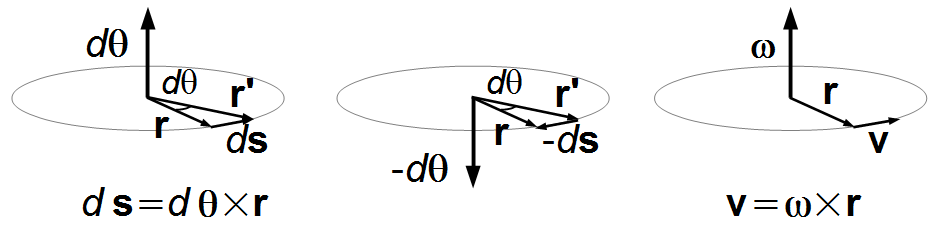
Observação: Algumas pessoas acham dífícil entender que o vetor deslocamento angular aponte
na direção
k perpendicularmente ao plano de rotação. Quando um corpo se desloca de uma posição
r para uma posição
r' temos um deslocamento infinitesimal
ds ao longo da
trajetória, o deslocamento angular
dθ está contido no plano, mas o vetor deslocamento
angular
dθ aponta perpendicularmente ao plano, isto preserva o produtor vetorial
(Figura 2). O vetor deslocamento angular indica que o corpo está em rotação, o seu módulo indica o
deslocamento angular (escalar) e o sentido do vetor indica o sentido de rotação do corpo, se o vetor
dθ é positivo o produto vetorial indica que o corpo está se deslocando no sentido
horário, se for negativo o corpo está se deslocando no sentido anti-horário.
Este é o mesmo argumento usado para a velocidade angular, o vetor velocidade
v é tangente à
trajetória, mas o vetor velocidade angular
ω é perpendicular à trajetória.
Substituindo
\( \mathbf N=0\;\mathbf i+0\;\mathbf j+pE\operatorname{sen}\theta\;\mathbf k \)
e
\( d\mathbf{\theta}=0\;\mathbf i+0\;\mathbf j+d\theta\;\mathbf k \)
na equação (VI) e calculando o produto escalar
\[
\begin{gather}
W=\int(0\;\mathbf i+0\;\mathbf j+pE\operatorname{sen}\theta\;\mathbf k)\dot{\;}(0\;\mathbf i+0\;\mathbf j+d\theta\;\mathbf k) \\[5pt]
W=\int0\times 0\;\underbrace{\mathbf i\times\mathbf i}_1+0\times 0\;\underbrace{\mathbf j\times\mathbf j}_1+pE\operatorname{sen}\theta d\theta\;\underbrace{\mathbf k\times\mathbf k}_1 \\[5pt]
W=\int pE\operatorname{sen}\theta\;d\theta \\[5pt]
W=pE\int_{\theta_0}^{\theta}\operatorname{sen}\theta \;d\theta \\[5pt]
W=pE\left.\left(-\cos\theta\right)\right|_{\;\theta _0}^{\;\theta } \\[5pt]
W=-pE\left(\cos\theta-\cos\theta_0\right)
\end{gather}
\]
Observação: Como i é um vetor unitário seu módulos é igual a 1 e o ângulo com o
próprio vetor é nulo (θ = 0 ), assim
\( \mathbf i\times\mathbf i=|\;\mathbf i\;|\;|\;\mathbf i\;|\cos0=1\times 1\times 1=1 \).
O trabalho é armazenado na forma de energia potencial do sistema
\[
\begin{gather}
W=\Delta U\\
\Delta U=-pE(\cos\theta -\cos\theta_0)
\end{gather}
\]
escolhendo para situação inicial
\( \theta_0=\frac{\pi}{2}\Rightarrow \cos\theta_0=0 \)
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{U=-pE\cos\theta}
\end{gather}
\]
Usando a definição do
Produto Escalar
\[
\begin{gather}
c=|\;a\;||\;b\;|\cos\theta
\end{gather}
\]
\[
\begin{gather}
c=\mathbf{a}\cdot {\mathbf{b}}
\end{gather}
\]
podemos escrever
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{U=-{\mathbf{p}}\cdot{\mathbf E}}
\end{gather}
\]