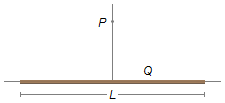
Uma carga Q está distribuída uniformemente ao longo de um fio reto de comprimento L.
Determinar o vetor campo elétrico nos pontos situados sobre a reta perpendicular ao fio e que passa pelo
meio do fio.
Dados do problema:
- Comprimento do fio: L;
- Carga do fio: Q.
Esquema do problema:
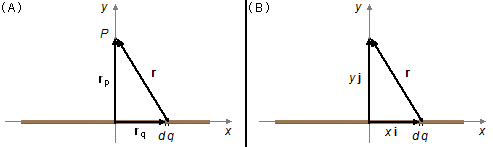
O vetor posição r vai de um elemento de carga dq do fio até o ponto P onde se deseja
calcular o campo elétrico, o vetor rq localiza o elemento de carga em relação à
origem do referencial e o vetor rp localiza o ponto P (Figura1-A).
\[
\begin{gather}
\mathbf r={\mathbf r}_p-{\mathbf r}_q
\end{gather}
\]
Pela geometria do problema devemos escolher coordenadas cartesianas, o vetor rq só
possui componente na direção i, é escrito como
\( {\mathbf r}_q=x\;\mathbf i \)
e o vetor rp só possui componente na direção j, é escrito como
\( {\mathbf r}_p=y\;\mathbf j \)
(Figura 1-B), então o vetor posição será
\[
\begin{gather}
\mathbf r=y\;\mathbf j-x\;\mathbf i \tag{I}
\end{gather}
\]
Da equação (I) o módulo do vetor posição r será
\[
\begin{gather}
r^2=(-x)^2+y^2 \\[5pt]
r=\left(x^2+y^2\right)^{1/2} \tag{II}
\end{gather}
\]
Solução:
O vetor campo elétrico do fio é dado por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\mathbf E=\frac{1}{4\pi\epsilon_0}\int{\frac{dq}{r^2}\;\frac{\mathbf r}{r}}}
\end{gather}
\]
\[
\begin{gather}
\mathbf E=\frac{1}{4\pi\epsilon_0}\int{\frac{dq}{r^3}\;\mathbf r} \tag{III}
\end{gather}
\]
Da equação da densidade linear de carga λ obtemos o elemento de carga dq
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\lambda=\frac{dq}{ds}}
\end{gather}
\]
\[
\begin{gather}
dq=\lambda\;ds \tag{IV}
\end{gather}
\]
onde ds é um elemento de comprimento do fio
\[
\begin{gather}
ds=dx \tag{V}
\end{gather}
\]
substituindo a equação (V) na equação (IV)
\[
\begin{gather}
dq=\lambda\;dx \tag{VI}
\end{gather}
\]
Substituindo as equações (I), (II) e (VI) na equação (III)
\[
\begin{gather}
\mathbf E=\frac{1}{4\pi\epsilon_0}\int {\frac{\lambda\;dx}{\left[\left(x^2+y^2\right)^{1/2}\right]^3}}\left(-x\;\mathbf i+y\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{1}{4\pi\epsilon_0}\int {\frac{\lambda\;dx}{\left(x^2+y^2\right)^{3/2}}}\left(-x\;\mathbf i+y\;\mathbf j\right) \tag{VII}
\end{gather}
\]
A densidade de carga λ é constante ela pode “sair” da integral
\[
\begin{gather}
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int{\frac{dx}{\left(x^2+y^2\right)^{3/2}}}\left(-x\;\mathbf i+y\;\mathbf j\right)
\end{gather}
\]
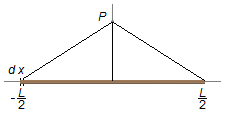
Como o ponto
P está sobre a reta que divide o fio ao meio, a integral será feita sobre todos os
elementos de comprimento
dx indo de
\( -{\frac{L}{2}} \)
até
\( \frac{L}{2} \)
(Figura 2)
\[
\begin{gather}
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-{\frac{L}{2}}}}^{{\frac{L}{2}}}{\frac{dx}{\left(x^2+y^2\right)^{3/2}}}\left(-x\;\mathbf i+y\;\mathbf j\right)
\end{gather}
\]
colocando y em evidência no numerador e y2 no denominador
\[
\begin{gather}
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-{\frac{L}{2}}}}^{{\frac{L}{2}}}{\frac{dx}{\left[y^2\left(1+\dfrac{x^2}{y^2}\right)\right]^{3/2}}}y\left(-{\frac{x}{y}}\;\mathbf i+\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-{\frac{L}{2}}}}^{{\frac{L}{2}}}{\frac{dx}{\left(y^{\cancel 2}\right)^{3/{\cancel 2}}\left[1+\left(\dfrac{x}{y}\right)^2\right]^{3/2}}}y\left(-{\frac{x}{y}}\;\mathbf i+\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-{\frac{L}{2}}}}^{{\frac{L}{2}}}{\frac{dx}{y^{\cancelto{2}{3}}\left[1+\left(\dfrac{x}{y}\right)^2\;\right]^{3/2}}}\cancel{y}\left(-{\frac{x}{y}}\;\mathbf i+\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-{\frac{L}{2}}}}^{{\frac{L}{2}}}{\frac{dx}{y^2\left[1+\left(\dfrac{x}{y}\right)^2\right]^{3/2}}}\left(-{\frac{x}{y}}\;\mathbf i+\;\mathbf j\right) \tag{VIII}
\end{gather}
\]
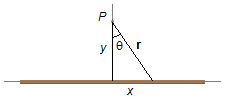
Considerando o ângulo θ medido entre o eixo-
y e a distância
r do elemento de carga
dq ao ponto
P, a tangente deste ângulo será (Figura 3)
\[
\begin{gather}
\operatorname{tg}\theta=\frac{x}{y} \\[5pt]
x=y\operatorname{tg}\theta \tag{IX}
\end{gather}
\]
substituindo a equação (IX) na equação (VIII)
\[
\begin{gather}
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-{\frac{L}{2}}}}^{{\frac{L}{2}}}{\frac{dx}{y^2\left[1+\left(\dfrac{\cancel{y}\operatorname{tg}\theta}{\cancel{y}}\right)^2\right]^{3/2}}}\left(-{\frac{\cancel{y}\operatorname{tg}\theta}{\cancel{y}}}\;\mathbf i+\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-{\frac{L}{2}}}}^{{\frac{L}{2}}}{\frac{dx}{y^2\left[1+\left(\operatorname{tg}\theta\right)^2\right]^{3/2}}}\left(-\operatorname{tg}\theta\;\mathbf i+\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-{\frac{L}{2}}}}^{{\frac{L}{2}}}{\frac{\mathit{dx}}{y^2\left(1+\operatorname{tg}^2\theta\right)^{3/2}}}\left(-\operatorname{tg}\theta\;\mathbf i+\;\mathbf j\right) \tag{X}
\end{gather}
\]
A partir da equação (IX) obtemos o elemento de comprimento dx em relação ao elemento de arco
dθ.
Derivada de
\( x=y\operatorname{tg}\theta \)
\[
\begin{gather}
\frac{dx}{d\theta}=y\frac{d}{d\theta}\left(\operatorname{tg}\theta \right)
\end{gather}
\]
reescrevendo
\( \operatorname{tg}\theta=\dfrac{\operatorname{sen}\theta}{\cos\theta} \),
temos a derivada de um quociente de funções dada pela fórmula
\[
\begin{gather}
\left(\frac{u}{v}\right)^{\Large '}=\frac{u'v-u\;v'}{v^2}
\end{gather}
\]
\[
\begin{align}
\frac{d}{d\theta}\left(\operatorname{tg}\theta\right)=\frac{d}{d\theta}\left(\frac{\operatorname{sen}\theta}{\cos\theta}\right) &=\frac{\cos\theta\cos\theta-\operatorname{sen}\theta(-\sin\theta)}{(\cos\theta)^2}=\\
&=\frac{\cos^2\theta+\operatorname{sen}^2\theta}{\cos^2\theta}=\frac{1}{\cos^2\theta}
\end{align}
\]
\[
\begin{gather}
\frac{dx}{d\theta}=y\frac{1}{\cos^2\theta}
\end{gather}
\]
Observação: Via de regra os livros de
Cálculo Integral e Diferencial apresentam a derivada da tangente na forma
\( \left(\operatorname{tg}\theta\right)^{'}=\sec^2\theta \),
onde
\( \sec\theta=\dfrac{1}{\cos\theta} \),
mas aqui por razões de simplificações posteriores vamos deixar a derivada na
forma mostrada acima.
\[
\begin{gather}
dx=y\frac{1}{\cos^2\theta}\;d\theta \tag{XI}
\end{gather}
\]
substituindo a definição da tangente e a equação (XI) na equação (X)
\[
\begin{gather}
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-{\frac{L}{2}}}}^{{\frac{L}{2}}}{\frac{1}{y^{\cancel{2}}\left[1+\left(\dfrac{\operatorname{sen}\theta}{\cos\theta}\;\right)^2\;\right]^{3/2}}}\cancel{y}\;\frac{d\theta}{\cos^2\theta}\;\left(\;-\frac{\operatorname{sen}\theta}{\cos\theta}\;\mathbf i+\;\mathbf j\;\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-{\frac{L}{2}}}}^{{\frac{L}{2}}}{\frac{1}{y\left[1+\left(\dfrac{\operatorname{sen}\theta}{\cos\theta}\;\right)^2\;\right]^{3/2}}}\;\frac{d\theta}{\cos^2\theta}\;\left(\;-\frac{\operatorname{sen}\theta}{\cos\theta}\;\mathbf i+\;\mathbf j\;\right)
\end{gather}
\]
Os extremos de integração para a variável θ devem variar de
−θm, o valor máximo medido no sentido horário, quando
x vale
\( -{\frac{L}{2}} \),
até θm o valor máximo medido no sentido anti-horário,
quando x vale
\( {\frac{L}{2}} \)
(Figura 4).
\[
\begin{gather}
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-\theta_m}}^{{\theta_m}}{\frac{1}{y\left(1+\dfrac{\operatorname{sen}^2\theta}{\cos^2\theta}\right)^{3/2}}}\;\frac{d\theta}{\cos^2\theta}\left(-{\frac{\operatorname{sen}\theta}{\cos\theta}}\;\mathbf i+\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-\theta_m}}^{{\theta_m}}{\frac{1}{y\left(\dfrac{\cos^2+\operatorname{sen}^2\theta}{\cos^2\theta}\right)^{3/2}}}\;\frac{d\theta}{\cos^2\theta}\;\left(-{\frac{\operatorname{sen}\theta}{\cos\theta}}\;\mathbf i+\;\mathbf j\;\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-\theta_m}}^{{\theta_m}}{\frac{1}{y\left(\dfrac{1}{\cos^2\theta}\right)^{3/2}}}\;\frac{d\theta}{\cos^2\theta}\left(-{\frac{\operatorname{sen}\theta}{\cos\theta}}\;\mathbf i+\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-\theta_m}}^{{\theta_m}}{\frac{1}{y\dfrac{1}{\left(\cos^2\theta\right)^{3/2}}}}\;\frac{d\theta}{\cos^2\theta}\left(-{\frac{\operatorname{sen}\theta}{\cos\theta}\;}\mathbf i+\;\mathbf j\;\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-\theta_m}}^{{\theta_m}}{\frac{1}{y\dfrac{1}{\cos^{\cancel{3}}\theta}}}\;\frac{d\theta}{\cancel{\cos^2\theta}}\left(-{\frac{\operatorname{sen}\theta}{\cos\theta}}\;\mathbf i+\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-\theta_m}}^{{\theta_m}}{\frac{1}{y\dfrac{1}{\cos\theta}}}\;d\theta\left(-{\frac{\operatorname{sen}\theta}{\cos\theta}}\;\mathbf i+\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0}\int_{{-\theta_m}}^{{\theta_m}}{\frac{\cos\theta}{y}}\;d\theta\left(-{\frac{\operatorname{sen}\theta}{\cos\theta}}\;\mathbf i+\;\mathbf j\right)
\end{gather}
\]
Como y é constante ele pode “sair” da integral e a integral da soma é igual à soma das integrais
\[
\begin{gather}
\mathbf E=\frac{\lambda}{4\pi\epsilon_0 y}\left(-\int_{{-\theta_m}}^{{\theta_m}}\cos\theta\frac{\operatorname{sen}\theta}{\cos\theta}\;d\theta\;\mathbf i+\int_{{-\theta_m}}^{{\theta_m}}\cos\theta\;d\theta\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0y}\left(\underbrace{-{\int_{{-\theta_m}}^{{\theta_m}}\operatorname{sen}\theta\;d\theta\;\mathbf i}}_0+\int_{{-\theta_m}}^{{\theta_m}}\cos\theta\;d\theta\;\mathbf j\right)
\end{gather}
\]
Integral de
\( \displaystyle \int_{{-\theta_m}}^{{\theta_m}}\cos\theta\;d\theta \)
1.º método
Como a função cosseno é uma função par,
f(
x) =
f(−
x), podemos integrar
sobre metade do intervalo, de 0 a θ
m, e multiplicar a integral por 2
\[
\begin{align}
2\int_0^{{\theta_m}}\cos\theta\;d\theta &=2\left.\operatorname{sen}\theta\right|_{\;0}^{\;\theta_m}=2(\operatorname{sen}\theta_m-\operatorname{sen}0)=\\
&=2(\operatorname{sen}\theta_m-0)=2\operatorname{sen}\theta_m
\end{align}
\]
2.º método
Podemos integrar sobre todo intervalo, de −θ
m a θ
m
\[
\begin{gather}
\int_{{-\theta_m}}^{{\theta_m}}\cos\theta\;d\theta=\left.\operatorname{sen}\theta\;\right|_{\;-\theta_m}^{\;\theta_m}=\operatorname{sen}\theta_m-\operatorname{sen}(-\theta_m)
\end{gather}
\]
como seno é uma função ímpar,
f(−
x) = −
f(
x), temos
\( \operatorname{sen}(-\theta_m)=-\operatorname{sen}(\theta_m) \)
\[
\begin{align}
\int_{{-\theta_m}}^{{\theta_m}}\cos\theta\;d\theta &=\operatorname{sen}\theta_m-(-\operatorname{sen}\theta_m)= \\
&=\operatorname{sen}\theta_m+\operatorname{sen}(\theta_m)=2\operatorname{sen}\theta_m
\end{align}
\]
Integral de
\( \displaystyle \int_{{-\theta_m}}^{{\theta_m}}\operatorname{sen}\theta\;d\theta \)
1.º método
\[
\begin{gather}
\int_{{-\theta_m}}^{{\theta_m}}\operatorname{sen}\theta\;d\theta=-\left.\cos\theta\;\right|_{\;-\theta_m}^{\;\theta_m}=-\left[\cos\theta_m-\cos(-\theta_m)\right]
\end{gather}
\]
como cosseno é uma função par,
f(
x) =
f(−
x), temos
\( \cos(\theta_m)=\cos(-\theta_m) \)
\[
\begin{gather}
\int_{{-\theta_m}}^{{\theta_m}}\operatorname{sen}\theta\;d\theta=-(\cos\theta_m-\cos\theta_m)=0
\end{gather}
\]
2.º método
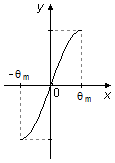
O gráfico do seno entre −θm e 0 possui uma área “negativa” abaixo do
eixo-x, e entre 0 e θm uma área “positiva” acima do eixo-x,
estas duas áreas se cancelam no cálculo da integral, sendo o valor da integral zero. na direção
i (Figura 5).
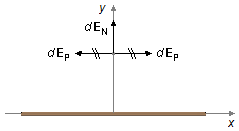
Observação: A integral na direção i, que é nula, representa o cálculo matemático
para a afirmação que se faz usualmente de que as componentes do campo elétrico paralelas ao
eixo-x, dEP, se anulam. Apenas as componentes normais ao
eixo-x, dEN, contribuem para o campo elétrico total (Figura 6).
\[
\begin{gather}
\mathbf E=\frac{\lambda}{4\pi\epsilon_0y}\left(-0\;\mathbf i+2\operatorname{sen}\theta_m\;\mathbf j\right) \\[5pt]
\mathbf E=\frac{\lambda}{4\pi\epsilon_0y}2\operatorname{sen}\theta_m\;\mathbf j \\[5pt]
\mathbf E=\frac{\lambda}{2\pi\epsilon_0y}\operatorname{sen}\theta_m\;\mathbf j \tag{XII}
\end{gather}
\]
A densidade linear de carga do fio todo é dada por
\[
\begin{gather}
\lambda=\frac{Q}{L} \tag{XIII}
\end{gather}
\]
substituindo a equação (XIII) na equação (XII)
\[
\begin{gather}
\mathbf E=\frac{Q}{2\pi\epsilon_0yL}\operatorname{sen}\theta_m\;\mathbf j \tag{XIV}
\end{gather}
\]
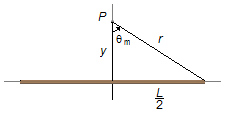
O seno de θm pode ser obtido da Figura 7
\[
\begin{gather}
\operatorname{sen}\theta_m=\frac{\frac{L}{2}}{r} \\[5pt]
\operatorname{sen}\theta_m=\frac{L}{2r} \tag{XV}
\end{gather}
\]
A hipotenusa
r é dada pelo
Teorema de Pitágoras
\[
\begin{gather}
r^2=y^2+\left(\frac{L}{2}\right)^2 \\[5pt]
r^2=y^2+\frac{L^2}{4} \\[5pt]
r=\sqrt{y^2+\frac{L^2}{4}\;} \\[5pt]
r=\sqrt{\frac{4y^2+L^2}{4}\;} \\[5pt]
r=\frac{\sqrt{4y^2+L^2\;}}{2} \tag{XVI}
\end{gather}
\]
substituindo a equação (XVI) na equação (XV)
\[
\begin{gather}
\operatorname{sen}\theta_m=\frac{L}{\cancel{2}\dfrac{\sqrt{4y^2+L^2\;}}{\cancel{2}}} \\[5pt]
\operatorname{sen}\theta_m=\frac{L}{\sqrt{4y^2+L^2\;}} \tag{XVII}
\end{gather}
\]
substituindo a equação (XVII) na equação (XIV)
\[
\begin{gather}
\mathbf E=\frac{Q}{2\pi\epsilon_0y\cancel{L}}\frac{\cancel{L}}{\sqrt{4y^2+L^2\;}}\;\mathbf j
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\mathbf E=\frac{Q}{2\pi\epsilon_0y}\frac{1}{\sqrt{4y^2+L^2}}\;\mathbf j}
\end{gather}
\]