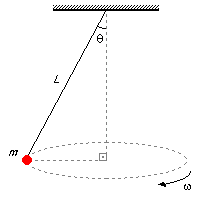
Um corpo de massa m está preso a uma corda, inextensível e de peso desprezível, e gira num plano
horizontal constituindo um pêndulo cônico. O comprimento da corda é igual a L, O ângulo que a
corda forma com a vertical é igual a θ. Determine:
a) A tensão T na corda;
b) A velocidade angular ω de rotação;
c) O período τ das oscilações;
d) A velocidade tangencial do corpo.
Dados do problema:
- Massa do corpo: m;
- Comprimento da corda: L;
- Ângulo entre a corda e a vertical: θ.
Esquema do problema:
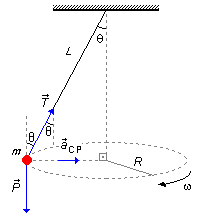
A massa m está sob a ação da força peso
\( \vec P \)
e da tensão
\( \vec T \)
na corda. Como o corpo realiza um movimento circular ele está sob a ação da
aceleração centrípeta
\( {\vec a}_{cp} \),
apontada radialmente para o centro da trajetória. O ângulo entre a tensão na corda e a vertical passando
pelo corpo é igual a θ, mesmo ângulo que temos entre a corda L e a vertical, são ângulos
alternos internos (Figura 1).
Solução:
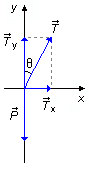
a) Desenhando as forças que atuam no corpo num sistema de eixos coordenados (Figura 2), aplicamos a
2.ª Lei de Newton
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\vec F=m\vec a} \tag{I}
\end{gather}
\]
- \( \vec P \): força peso do corpo;
- \( \vec T \): força de tensão na corda.
Na direção vertical a força peso e a componente da força de tensão na direção
y se anulam
\[
\begin{gather}
P=T_y \tag{II}
\end{gather}
\]
O ângulo θ medido entre o vetor
\( \vec T \)
e o eixo-y ao contrário do que se faz usualmente, em que se mede um ângulo a partir do
eixo-x, temos que a componente da tração na direção de y será
\[
\begin{gather}
T_y=T\cos\theta \tag{III}
\end{gather}
\]
a força peso é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{P=m g} \tag{IV}
\end{gather}
\]
substituindo as equações (III) e (IV) na equação (II)
\[
\begin{gather}
T\cos\theta =m g
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{T=\frac{m g}{\cos\theta}}
\end{gather}
\]
b) Pela Figura 2 escrevemos para um corpo em movimento circular, onde atua a aceleração centrípeta
\[
\begin{gather}
\bbox[#99CCFF,10px]
{{\vec F}_{cp}=m{\vec a}_{cp}}
\end{gather}
\]
a componente do vetor
\( \vec T \)
ao longo do eixo-x,
\( T_x \),
é a única força responsável pela força centrípeta
\( {\vec F}_{cp} \)
\[
\begin{gather}
F_{cp}=T_x=m a_{cp} \tag{V}
\end{gather}
\]
a componente da força de tensão na direção x é dada por
\[
\begin{gather}
T_x=T\operatorname{sen}\theta \tag{VI}
\end{gather}
\]
substituindo T pelo valor encontrado no item anterior
\[
\begin{gather}
T_x=\frac{mg}{\cos\theta}\;\operatorname{sen}\theta \tag{VII}
\end{gather}
\]
A aceleração centrípeta é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{a_{cp}=\frac{v^2}{R}} \tag{VIII}
\end{gather}
\]
substituindo as equações (VII) e (VIII) na equação (V)
\[
\begin{gather}
\frac{\cancel{m} g}{\cos\theta}\;\operatorname{sen}\theta=\cancel m\frac{v^2}{R} \\[5pt]
\frac{g}{\cos\theta }\;\operatorname{sen}\theta =\frac{v^2}{R} \tag{IX}
\end{gather}
\]
A velocidade tangencial é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v=\omega R} \tag{X}
\end{gather}
\]
substituindo a equação (X) na equação (IX)
\[
\begin{gather}
\frac{g}{\cos\theta}\operatorname{sen}\theta=\frac{(\omega R)^2}{R} \\[5pt]
\frac{g}{\cos\theta}\operatorname{sen}\theta=\frac{\omega^2R^{\cancel{2}}}{\cancel{R}} \\[5pt]
\frac{g}{\cos\theta}\operatorname{sen}\theta=\omega^2R \tag{XI}
\end{gather}
\]
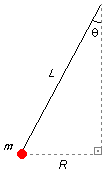
O valor do raio
R da trajetória não é fornecido pelo problema, é preciso encontrar esse valor
em função dos dados do problema (Figura 3)
\[
\begin{gather}
\operatorname{sen}\theta=\frac{\text{cateto oposto}}{\text{hipotenusa}}=\frac{R}{L} \\[5pt]
R=L\operatorname{sen}\theta \tag{XII}
\end{gather}
\]
substituindo a equação (XII) na equação (XI)
\[
\begin{gather}
\frac{g}{\cos\theta}\cancel{\operatorname{sen}\theta}=\omega^2L\cancel{\operatorname{sen}\theta} \\[5pt]
\frac{g}{\cos\theta}=\omega^2L \\[5pt]
\omega^2=\frac{g}{L\cos\theta}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\omega=\sqrt{\frac{g}{L\cos\theta}\;}}
\end{gather}
\]
c) O período τ é calculado usando a equação para a velocidade angular dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\omega=\frac{2\pi}{\tau}}
\end{gather}
\]
substituindo o valor da velocidade angular ω obtido no item anterior
\[
\begin{gather}
\sqrt{\frac{g}{L\cos\theta}\;}=\frac{2\pi}{\tau} \\[5pt]
\tau =\frac{2\pi}{\sqrt{\dfrac{g}{L\cos\theta}\;}}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\tau=2\pi\sqrt{\frac{L\cos\theta}{g}\;}}
\end{gather}
\]
d) Substituindo a solução do item (b) para a velocidade angular ω e a equação (XII) na equação (X)
\[
\begin{gather}
v=\sqrt{\frac{g}{L\cos\theta}\;}\;L\operatorname{sen}\theta
\end{gather}
\]
colocando o termo L sen θ dentro da raiz
\[
\begin{gather}
v=\sqrt{\frac{g}{\cancel L\cos\theta}\;L^{\cancel 2}\operatorname{sen}^2\theta\;}
\end{gather}
\]
Da Trigonometria
\( \operatorname{tg}\theta=\frac{\operatorname{sen}\theta;}{\cos\theta} \)
\[
\begin{gather}
v=\sqrt{\frac{g L\operatorname{sen}\theta\operatorname{sen}\theta}{\cos\theta}\;}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{v=\sqrt{g L\operatorname{tg}\theta\operatorname{sen}\theta}}
\end{gather}
\]