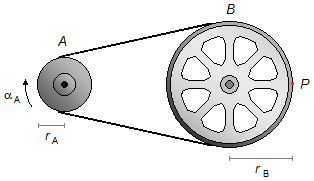
Uma polia A, de raio 0,15 m, inicia seu movimento a partir do repouso com aceleração angular constante de 2 rad/s2. Esta polia é conectada a uma roda B, de raio 0,40 m, por uma correia que gira sem escorregamento. Determine os módulos da velocidade e da aceleração de um ponto P na periferia da roda B após duas rotações.
Dados do problema:
- Raio da polia A: ra = 0,15 m;
- Aceleração da polia A: αa = 2 rad/s2;
- Raio da polia B: rb = 0,40 m;
- Deslocamento angular do ponto B: φb = 2 rotações
- Velocidade inicial da polia A: v0a = 0;
- Velocidade angular inicial da polia A: ω0a = 0;
- Velocidade inicial da roda B: v0b = 0;
- Velocidade angular inicial da roda B: ω0b = 0.
Solução:
Em primeiro lugar devemos converter o deslocamento do ponto B dado em rotações para radianos (rad)
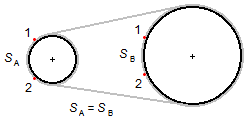
O problema nos diz que na correia de ligação entre as polias não há escorregamento, assim as polias giram solidárias (giram juntas) e o módulo do deslocamento é o mesmo para todos os pontos da correia e também para os pontos periféricos da polia e da roda. O deslocamento de um ponto em movimento circular é dado por
substituindo os dados do problema e adotando π = 3,14 encontramos o deslocamento angular de um ponto da polia A
Como a polia e a roda iniciam seus movimentos com aceleração angular constante elas estão em Movimento Circular Uniformemente Variado (M.C.U.V.), usando a Equação de Torricelli para movimento circular
Como a polia e a roda giram solidárias elas têm o mesmo deslocamento com a mesma velocidade, em módulo dada por
Aplicando a condição de igualdade para a velocidade, obtemos a velocidade de um ponto P da roda
O módulo da aceleração tangencial é dado por
Aplicando a condição de igualdade para a aceleração, obtemos a aceleração de um ponto P da roda (Figura 2)
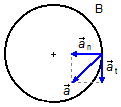
Figura 2
A aceleração normal (centrípeta) para a roda B é dada por
A aceleração total será a soma vetorial das componentes tangencial e normal acima
usando o Teorema de Pitágoras o módulo da aceleração total será