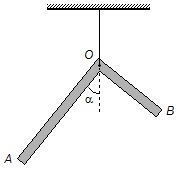
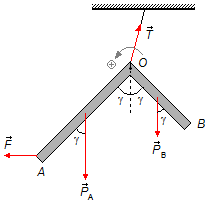
Uma barra AOB homogênea de seção transversal constante cujo peso é de 15 N é dobrada formando um
ângulo reto em O com AO=1 m e BO=0,5 m. Suspende-se a barra pelo ponto O.
Determinar:
a) O ângulo α formado por AO com a vertical na posição de equilíbrio;
b) A intensidade da força horizontal que deve ser aplicada em A, no plano AOB, para que
AO e BO sejam igualmente inclinados em relação à horizontal;
c) No caso do item (b), encontre a intensidade reação no ponto de suspensão O.
Dados do problema:
- Peso da barra: P=15 N;
- Comprimento do segmento AO: DA=1 m;
- Comprimento do segmento BO: DB=0,5 m.
Esquema do problema:
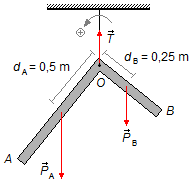
Adotamos o ponto O, onde a peça está fixa, como ponto de referência. Como a barra é homogênea e
de seção constante sua massa está igualmente distribuída por toda a sua extensão, assim podemos
considerar que o centro de massa de cada um dos “braços” da peça está em seu centro. Em AO o
centro está em
\( d_{\small A}=\frac{D_{\small A}}{2}=\frac{1}{2}=0,5\;\mathrm m \),
onde está aplicada a força peso
\( \vec{P}_{\small A} \).
Em BO o centro está em
\( d_{\small B}=\frac{D_{\small B}}{2}=\frac{0,5}{2}=0,25\;\mathrm m \),
onde está aplicada a força peso
\( {\vec{P}}_{\small B} \).
No ponto O temos a força de tensão
\( \vec{T} \)
(Figura 1).
A peça pode girar em torno do ponto O, vamos adotar o sentido anti-horário como sendo positivo.
Como a barra está dobrada numa proporção 2:1, ou seja, um “braço” tem o dobro do comprimento do outro
(1 m e 0,5 m), e como a barra é homogênea, seu peso está distribuído na mesma proporção. Assim do total
de 15 N,
PA=10 N e PB=5 N.
Solução:
a) O momento de uma força é dado por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{M=Fd} \tag{I}
\end{gather}
\]
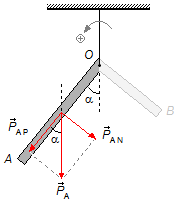
“Esquecendo” o segmento
BO da peça e considerando apenas o segmento
AO, a força peso
\( {\vec P}_{\small A} \)
pode ser decomposta em duas componentes, uma componente paralela ao “braço”
\( {\vec P}_{\small{AP}} \)
e outra componente perpendicular ou normal
\( {\vec P}_{\small{AN}} \).
O ângulo entre o segmento
AO e a vertical por
O é dada igual à
α, a força peso
\( {\vec P}_{\small A} \)
é paralela à vertical que passa por
O e a componente
\( {\vec P}_{\small{AP}} \)
está na mesma direção que o segmento
AO, então o ângulo entre a força peso e a componente
paralela também vale
α, são ângulos correspondes (Figura 2).
Apenas a componente normal contribui para que o “braço” gire em torno do ponto
O, como esta
componente faz girar no mesmo sentido da orientação escolhida o momento desta força será positivo,
aplicando a expressão (I)
\[
\begin{gather}
M_{P_{\small{AN}}}=P_{AN}d_{\small A} \tag{II}
\end{gather}
\]
A compoente normal é dada por (Figura 2)
\[
\begin{gather}
P_{\small{AN}}=P_{\small A}\operatorname{sen}\alpha \tag{III}
\end{gather}
\]
substituindo a expressão (III) na expressão (II)
\[
\begin{gather}
M_{P_{\small{AN}}}=P_{\small A}\operatorname{sen}\alpha d_{\small A} \tag{IV}
\end{gather}
\]
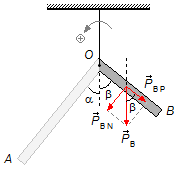
“Esquecendo” o segmento
AO da peça e considerando apenas o segmento
BO, a força peso
\( {\vec P}_{\small B} \)
pode ser decomposta em duas componentes, uma componente paralela ao “braço”
\( {\vec P}_{\small{BP}} \)
e outra componente perpendicular ou normal
\( {\vec P}_{\small{BN}} \).
O ângulo entre o segmento
BO e a vertical por
O chamamos de
β, a força peso
\( {\vec P}_{\small B} \)
é paralela à vertical que passa por
O e a componente
\( {\vec P}_{\small{BP}} \)
está na mesma direção que o segmento
BO, então o ângulo entre a força peso e a componente
paralela também vale
β, são ângulos correspondes (Figura 3). Como a barra foi dobrada com um
ângulo reto (90°) em
O a soma de
α e
β deve ser 90°, são ângulos
complementares, então
β deve ser
\( \alpha +\beta =90°\Rightarrow \beta=90°-\alpha \).
Apenas a componente normal contribui para que o “braço” gire em torno do ponto
O, como esta
componente faz girar no sentido contrário da orientação escolhida o momento desta força será negativo,
aplicando a expressão (I)
\[
\begin{gather}
M_{P_{\small{BN}}}=-P_{\small{BN}}d_{\small B} \tag{V}
\end{gather}
\]
A componente normal será dada por (Figura 3)
\[
\begin{gather}
P_{\small{BN}}=P_{BA}\operatorname{sen}\beta\\[5pt]
P_{\small{BN}}=P_{\small B}\operatorname{sen}(90°-\alpha)
\end{gather}
\]
Da
Trigonometria
\( \sin (a-b)=\operatorname{sen}a\,\cos b-\sin b\,\cos a \)
\[ \sin (a-b)=\operatorname{sen}a\,\cos b-\sin b\,\cos a \]
\[
\begin{gather}
P_{\small{BN}}=P_{\small B}(\operatorname{sen}90°\cos \alpha -\operatorname{sen}\alpha \cos 90°)\\[5pt]
P_{\small{BN}}=P_{\small B}(1\times\cos \alpha -\operatorname{sen}\alpha\times 0)\\[5pt]
P_{\small{BN}}=P_{\small B}\cos \alpha \tag{VI}
\end{gather}
\]
substituindo a expressão (VI) na expressão (V)
\[
\begin{gather}
M_{P_{BN}}=-P_{\small B}\cos \alpha d_{\small B} \tag{VII}
\end{gather}
\]
No ponto O temos a força de tensão, aplicando (I)
\[
\begin{gather}
M_{\small T}=Td_{\small T}
\end{gather}
\]
como a distância é nula em relação à origem,
\( d_{\small T}=0 \),
a força está aplicada na própria origem
\[
\begin{gather}
M_{\small T}=T\times 0\\[5pt]
M_{\small T}=0 \tag{VIII}
\end{gather}
\]
Usando a condição de que a somatória dos momentos é nula
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\sum M=0} \tag{IX}
\end{gather}
\]
substituindo as expressões (IV), (VII) e (VIII) na condição (IX)
\[
\begin{gather}
M_{P_{\small{AN}}}+M_{P_{\small{BN}}}+M_{\small T}=0\\[5pt]
P_{\small A}\operatorname{sen}\alpha d_{\small A}-P_{\small B}\cos \alpha d_{\small B}+0=0\\[5pt]
P_{\small A}\operatorname{sen}\alpha d_{\small A}=P_{\small B}\cos \alpha d_{\small B}\\[5pt]
\frac{\operatorname{sen}\alpha }{\cos \alpha}=\frac{P_{\small B}d_{\small B}}{P_{\small A}d_{\small A}}
\end{gather}
\]
Da Trigonometria
\( \operatorname{tg}\alpha =\frac{\operatorname{sen}\alpha }{\cos \alpha } \)
substituindo os dados do problema
\[
\begin{gather}
\operatorname{tg}\alpha =\frac{5\times 0,25}{10\times 0\times 5}\\[5pt]
\operatorname{tg}\alpha =\frac{1,25}{5}\\[5pt]
\operatorname{tg}\alpha =0,25\\[5pt]
\alpha =\operatorname{arc tg}\,0,25
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\alpha \simeq 14°}
\end{gather}
\]
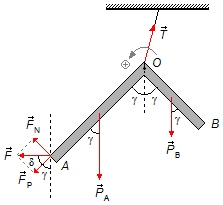
b) Uma força
\( \vec F \)
aplicada no ponto
A faz a peça girar em torno do ponto
O até que os ângulos entre os
dois segmentos fiquem iguais a
γ, a peça também é puxada para a esquerda de modo que o fio
de fixação no teto deixa de estar num posição vertical (Figura 4).
Observação: Na condição do item (a) o ângulo α entre o segmento AO e a
vertical foi determinado como sendo 14°, portanto o ângulo entre o segmento BO e a vertical vale
\( 90°-14°=76° \).
Para que os dois ângulos fiquem iguais, a peça deve girar de modo que o ângulo de 14° aumente e o de 76°
diminua (até ficarem iguais a 45°), isto acontece quando a peça gira no sentido horário, não confundir
com a seta da Figura 4 que indica apenas o sentido positivo do sistema de referência.
Considerando apenas o segmento
AO, a força
\( \vec F \)
pode ser decomposta em duas componentes, uma componente paralela ao “braço”
\( {\vec F}_{P} \)
e outra componente perpendicular ou normal
\( {\vec F}_{N} \).
O ângulo entre o segmento
AO e a vertical por
O é
γ, o ângulo entre a vertical
que passa pelo ponto
A e a componente paralela à
AO também é
γ, são ângulos
correspondentes. Como a força aplicada é horizontal ela forma um ângulo δ com a componente
paralela, a soma de
γ e
δ deve ser 90° (são ângulos complementares)
\( \gamma +\delta =90°\Rightarrow \delta =90°-\gamma \)
(Figura 5).
Apenas a componente normal contribui para que o “braço” gire em torno do ponto
O, como esta
componente faz girar no sentido contrário da orientação escolhida o momento desta força será negativo,
pela expressão (I), onde a distância do ponto de referência
O ao ponto de aplicação da força é o
comprimento do segmento
AO dado no problema
\[
\begin{gather}
M_{F_{N}}=-F_{N}D_{\small A} \tag{X}
\end{gather}
\]
A componente normal será dada por (Figura 5)
\[
\begin{gather}
F_{N}=F\operatorname{sen}\delta\\[5pt]
F_{N}=F\operatorname{sen}(90°-\gamma)
\end{gather}
\]
usando a propriedade do seno da diferença acima
\[
\begin{gather}
F_{N}=F(\operatorname{sen}90°\cos \gamma -\operatorname{sen}\gamma \cos 90°)\\[5pt]
F_{N}=F(1\times \cos \gamma -\operatorname{sen}\gamma \times 0)\\[5pt]
F_{N}=F\cos \gamma \tag{XI}
\end{gather}
\]
substituindo a expressão (XI) na expressão (X)
\[
\begin{gather}
M_{F_{N}}=-F\cos \gamma D_{\small A} \tag{XII}
\end{gather}
\]
Para as outras forças envolvidas no sistema continuam válidas as expressões anteriores com a mudança do
ângulo α em (IV) e (VII) pelo novo ângulo γ. Substituindo (IV), (VII), (VIII)
e (XII) na condição (IX)
\[
\begin{gather}
M_{P_{\small{AN}}}+M_{P_{\small{BN}}}+M_{\small T}+M_{F_{N}}=0\\[5pt]
P_{\small A}\operatorname{sen}\gamma d_{\small A}-P_{\small B}\cos \gamma d_{\small B}+0-F\cos \gamma D_{\small A}=0\\[5pt]
P_{\small A}\operatorname{sen}\gamma d_{\small A}=P_{\small B}\cos \gamma d_{\small B}+F\cos \gamma D_{\small A}
\end{gather}
\]
colocando cos γ em evidência do lado direito da igualdade
\[
\begin{gather}
P_{\small A}\operatorname{sen}\gamma d_{\small A}=\cos \gamma (P_{\small B}d_{\small B}+FD_{\small A})
\end{gather}
\]
a barra é dobrada formando um ângulo de 90°, e queremos que os dois lados tenham a mesma inclinação
\( \gamma =45° \)
Da Trigonometria
\( \cos 45°=\operatorname{sen}45°=\frac{\sqrt{2\,}}{2} \)
\[
\begin{gather}
P_{\small A}d_{\small A}\cancel{\frac{\sqrt{2\,}}{2}}=\cancel{\frac{\sqrt{2\,}}{2}}(P_ {B}d_{\small B}+FD_{\small A})
P_{\small A}d_{\small A}=P_{\small B}d_{\small B}+FD_{\small A}\\[5pt]
F=\frac{P_{\small A}d_{\small A}-P_{\small B}d_{\small B}}{D_{\small A}}
\end{gather}
\]
substituindo os valores dados
\[
\begin{gather}
F=\frac{10\times 0,5-5\times 0,25}{1}\\[5pt]
F=5-1,25
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{F=3,75\;\mathrm N}
\end{gather}
\]
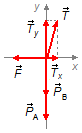
c) Desenhando as forças que atuam no sistema da Figura 5 em um sistema de eixos coordenados
xy
temos o esquema mostrado na Figura 6. Para que o sistema permaneça em equilíbrio aplicamos a condição
de que a somatória das forças é nula
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\sum F=0} \tag{XIII}
\end{gather}
\]
Direção x:
- \( {\vec T}_x \): componente da força de tensão na direção x;
- \( \vec F \): força externa aplicada para equilibrar a barra.
Aplicando a condição (XIII)
\[
\begin{gather}
T_x-F=0\\[5pt]
T_x=F
\end{gather}
\]
usando o resultado do item (b)
\[
\begin{gather}
T_x=3,75\;\mathrm N \tag{XIV}
\end{gather}
\]
Direção y:
- \( {\vec T}_y \): componente da força de tensão na direção y;
- \( {\vec P}_{\small A} \): força peso do segmento AO;
- \( {\vec P}_{\small B} \): força peso do segmento BO.
Aplicando a condição (XIII)
\[
\begin{gather}
T_y-P_{\small A}-P_{\small B}=0\\[5pt]
T_y=P_{\small A}+P_{\small B}
\end{gather}
\]
substituindo os dados do problema
\[
\begin{gather}
T_y=10+5 \\[5pt]
T_y=15\;N \tag{XV}
\end{gather}
\]
A reação à tensão será dada pelo Teorema de Pitágoras (Figura 6)
\[
\begin{gather}
T^2=T_x^2+T_y^2
\end{gather}
\]
substituindo as expressões (XIV) e (XV)
\[
\begin{gather}
T^2=3,75^2+15^2\\[5pt]
T^2=14,1+225\\[5pt]
T^2=239,1\\[5pt]
T=\sqrt{239,1\;}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{T\simeq 15,4\;\mathrm N}
\end{gather}
\]