Solved Problem on Moment of Inertia
advertisement
A system has three masses connected by bars with negligible masses which are located at the points
indicated in the figure.
a) Calculate the position of the Center of Mass of this system;
b) Calculate the Moment of Inertia about the Center of Mass of the system.
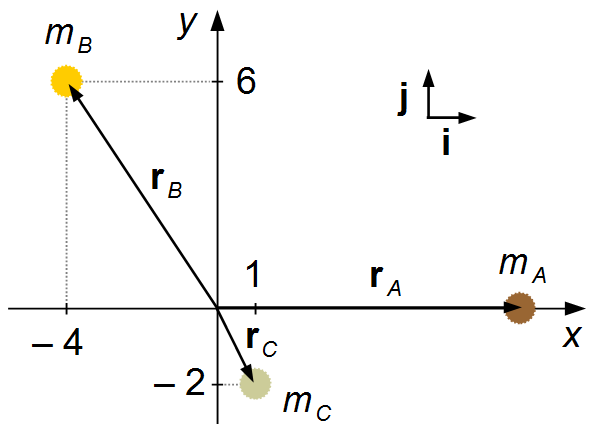
The masses and positions of the bodies are: mA = 5 kg, (xA, yA) = (8, 0), mB = 7 kg, (xB, yB) = (–4, 6) and mC = 2 kg, (xC, yC) = (1, –2).
a) Calculate the position of the Center of Mass of this system;
b) Calculate the Moment of Inertia about the Center of Mass of the system.
The masses and positions of the bodies are: mA = 5 kg, (xA, yA) = (8, 0), mB = 7 kg, (xB, yB) = (–4, 6) and mC = 2 kg, (xC, yC) = (1, –2).

Problem data:
- Mass of body A: mA = 5 kg;
- Body position A: (xA, yA) = (8, 0);
- Mass of body B: mB = 7 kg;
- Body position B: (xB, yB) = (–4, 6);
- Mass of body C: mC = 2 kg;
- Body position C: (xC, yC) = (1, –2).
Solution
a) The Center of Mass is given by
\[
\begin{gather}
\bbox[#99CCFF,10px]
{{\mathbf{r}}_{CM}=\frac{\displaystyle \sum_{i=1}^{n}m_{i}{\mathbf{r}}_{i}}{\displaystyle \sum_{i=1}^{n}m_{i}}}
\end{gather}
\]
The position vectors of the bodies A, B and C are given by (Figure 1)
\[
\begin{gather}
{\mathbf{r}}_{A}=8\;\mathbf{i}+0\;\mathbf{j}\\
{\mathbf{r}}_{A}=8\;\mathbf{i}
\end{gather}
\]
\[
\begin{gather}
{\mathbf{r}}_{B}=-4\;\mathbf{i}+6\;\mathbf{j}
\end{gather}
\]
\[
\begin{gather}
{\mathbf{r}}_{C}=1\;\mathbf{i}-2\;\mathbf{j}\\
{\mathbf{r}}_{C}=\mathbf{i}-2\;\mathbf{j}
\end{gather}
\]
The positin vector of the Center of Massa will be
\[
\begin{gather}
{\mathbf{r}}_{CM}=\frac{\displaystyle \sum_{i=1}^{n}m_{i}x_{i}\;\mathbf{i}+\displaystyle \sum_{i=1}^{n}m_{i}y_{i}\;\mathbf{j}}{\displaystyle \sum_{i=1}^{n}m_{i}}\\[5pt]
{\mathbf{r}}_{CM}=\frac{(8\times 5+(-4)\times 7+1\times 2)\;\mathbf{i}+(0\times 5+6\times 7+(-2)\times 2)\;\mathbf{j}}{5+7+2}\\[5pt]
{\mathbf{r}}_{CM}=\frac{(40-28+2)\;\mathbf{i}+(0+42-4)\;\mathbf{j}}{14}\\[5pt]
{\mathbf{r}}_{CM}=\frac{14\;\mathbf{i}+38\;\mathbf{j}}{14}
\end{gather}
\]
The positin vector of the Center of Massa (Figure 2)
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{{\mathbf{r}}_{CM}=\mathbf{i}+2.7\;\mathbf{j}}
\end{gather}
\]
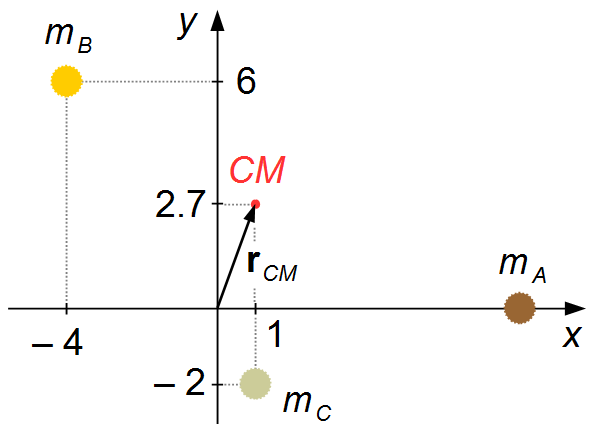
b) The distance r from each body to the Center of Mass will be given by the formula for the distance between two points (Figure 2)
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\left|\mathbf{r}\right|=r=\sqrt{\left(x-x_{CM}\right)^{2}+\left(y-y_{CM}\right)^{2}\;}}
\end{gather}
\]
The distance rA from body A to the Center of Mass will be (Figure 2)
\[
\begin{gather}
r_{A}=\sqrt{\left(x_{A}-x_{CM}\right)^{2}+\left(y_{A}-y_{CM}\right)^{2}\;}\\[5pt]
r_{A}=\sqrt{\left(8-1\right)^{2}+\left(0-2.7\right)^{2}\;}\\[5pt]
r_{A}=\sqrt{\left(7\right)^{2}+\left(-2.7\right)^{2}\;}\\[5pt]
r_{A}=\sqrt{49+7.3\;}\\[5pt]
r_{A}=\sqrt{56.3\;}\\[5pt]
r_{A}\approx 7.5
\end{gather}
\]
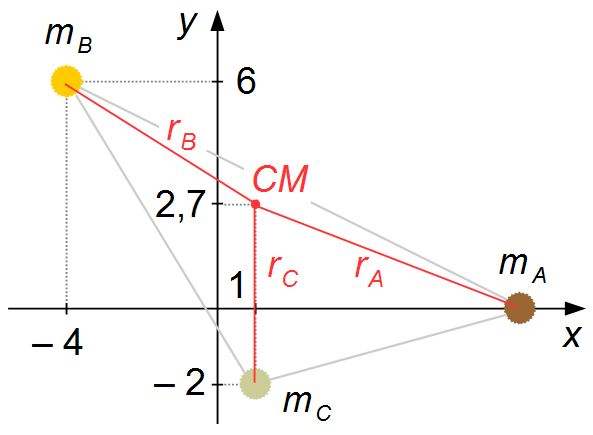
The distance rB from body B to the Center of Mass will be (Figure 2)
\[
\begin{gather}
r_{B}=\sqrt{\left(x_{B}-x_{CM}\right)^{2}+\left(y_{B}-y_{CM}\right)^{2}\;}\\[5pt]
r_{B}=\sqrt{\left(-4-1\right)^{2}+\left(6-2.7\right)^{2}\;}\\[5pt]
r_{B}=\sqrt{\left(-5\right)^{2}+\left(3.3\right)^{2}\;}\\[5pt]
r_{B}=\sqrt{25+10.9\;}\\[5pt]
r_{B}=\sqrt{35.9\;}\\[5pt]
r_{B}\approx 6
\end{gather}
\]
The distance rC from body C to the Center of Mass will be (Figure 2)
\[
\begin{gather}
r_{C}=\sqrt{\left(x_{C}-x_{CM}\right)^{2}+\left(y_{C}-y_{CM}\right)^{2}\;}\\[5pt]
r_{C}=\sqrt{\left(1-1\right)^{2}+\left(-2-2.7\right)^{2}\;}\\[5pt]
r_{C}=\sqrt{\left(0\right)^{2}+\left(-4.7\right)^{2}\;}\\[5pt]
r_{C}=\sqrt{22.1\;}\\[5pt]
r_{C}\approx 4.7
\end{gather}
\]
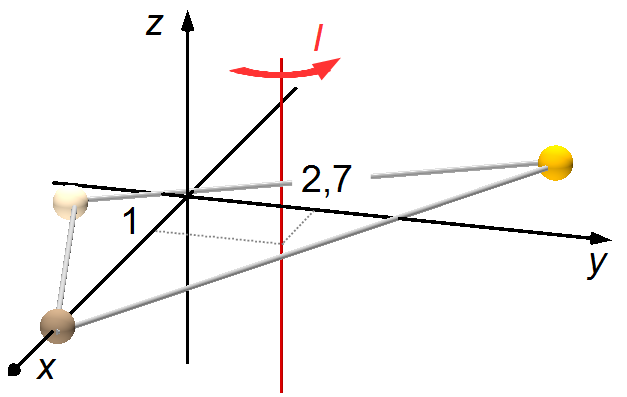
The Moment of Inertia about the axis passing through the Center of Mass is given by
\[
\begin{gather}
\bbox[#99CCFF,10px]
{I_{CM}=\sum_{i=1}^{n}m_{i}r_{i}^{2}}
\end{gather}
\]
substituting the distances rA, rB and rC obtained
above (Figure 3)
\[
\begin{gather}
I=5\times (7.5)^{2}+7\times (6)^{2}+2\times (4.7)^{2}\\[5pt]
I=5\times 56.3+7\times 36+2\times 22.1\\[5pt]
I=281.5+252+44.2
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{I=577.7 \;\text{kg.m}^{2}}
\end{gather}
\]
advertisement

Fisicaexe - Physics Solved Problems by Elcio Brandani Mondadori is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License .