Solved Problem on Moment of Inertia
advertisement
A system consists of two bodies of mass M and m (M>m) connected by a rod
of negligible mass, the distance between its centers is equal to R. Calculate the moment of
inertia relative to an axis passing through the center of mass of the system.

Problem data:
- Mass of body 1: M;
- Mass of body 2: m;
- Distance between the bodies: R.
First, we must determine the position of the center of mass of the system to know the distance from each
body to the center of mass. We choose a frame of reference with origin at the body of mass M and
pointing to the right (Figure 1).
The body of mass M is at the origin, r1 = 0, the center of mass is at a distance rCM of the origin, and the body of mass m at a distance r2 = R.
The position of the center of mass is given by
The body of mass M is at the origin, r1 = 0, the center of mass is at a distance rCM of the origin, and the body of mass m at a distance r2 = R.
The position of the center of mass is given by
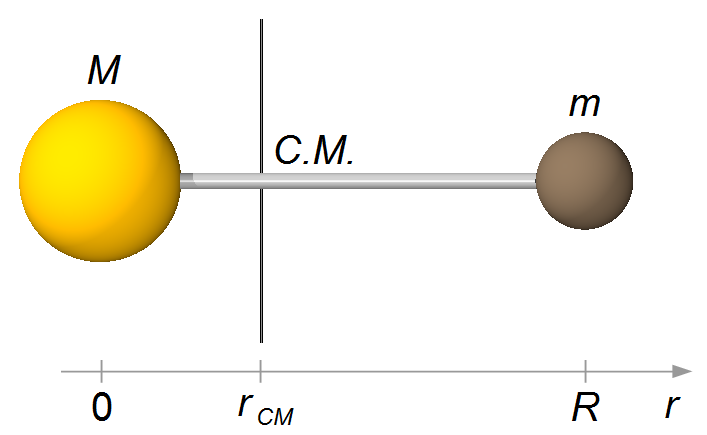
FigurE 1
\[ \bbox[#99CCFF,10px]
{r_{CM}=\frac{\sum_{i=1}^{n}m_{i}{\mathbf{r}}_{i}}{\sum_{i=1}^{n}m_{i}}}
\]
for n = 2
\[
\begin{gather}
r_{CM}=\frac{m_{1}r_{1}+m_{2}r_{2}}{m_{1}+m_{2}}\\
r_{CM}=\frac{M.0+mR}{M+m}\\r_{CM}=\frac{mR}{M+m} \tag{I}
\end{gather}
\]
Body 1 is at a distance r1 = rCM of the axis passing through the
center of mass, and body 2 is at a distance r2 = R−r1
from the axis (Figure 2).
Note: Do not confuse r1 in calculating the position of the center of
mass, which represented the distance from body 1 to the origin of the frame of reference,
r1 = 0, in the first part of the problem, with r1 used here to
represent the distance from the body 1 to the axis passing through the center of mass,
r1 = rCM.
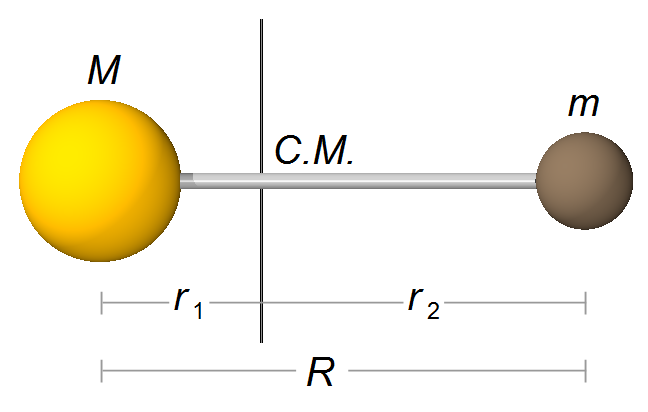
Figure 2
The moment of inertia relative to the axis is given by
\[ \bbox[#99CCFF,10px]
{I=\sum_{i=1}^{n}m_{i}r_{i}^{2}}
\]
for n =2, and substituting r1 with the expression (I)
\[
\begin{gather}
I=m_{1}r_{1}^{2}+m_{1}r_{1}^{2}\\[5pt]
I=M\left(\frac{mR}{M+m}\right)^{2}+m(R-r_{1})^{2}\\[5pt]
I=\frac{Mm^{2}R^{2}}{\left(M+m\right)^{2}}+m\left(R-\frac{mR}{M+m}\right)^{2}\\[5pt]
I=\frac{Mm^{2}R^{2}}{\left(M+m\right)^{2}}+m\left[R\left(1-\frac{m}{M+m}\right)\right]^{2}\\[5pt]
I=\frac{Mm^{2}R^{2}}{\left(M+m\right)^{2}}+mR^{2}\left(1-\frac{m}{M+m}\right)^{2}\\[5pt]
I=\frac{Mm^{2}R^{2}}{\left(M+m\right)^{2}}+mR^{2}\left(\frac{M+m-m}{M+m}\right)^{2}\\[5pt]
I=\frac{Mm^{2}R^{2}}{\left(M+m\right)^{2}}+mR^{2}\left(\frac{M^{2}}{\left(M+m\right)^{2}}\right)\\[5pt]
I=\frac{Mm^{2}R^{2}}{\left(M+m\right)^{2}}+mR^{2}\left(\frac{M^{2}}{\left(M+m\right)^{2}}\right)\\[5pt]
I=\frac{Mm^{2}R^{2}}{\left(M+m\right)^{2}}+\frac{M^{2}mR^{2}}{\left(M+m\right)^{2}}\\[5pt]
I=\frac{Mm}{\left(M+m\right)^{2}}R^{2}+\left(M+m\right)\\[5pt]
I=\frac{Mm}{M+m}R^{2}
\end{gather}
\]
setting
\( \mu =\frac{Mm}{M+m} \)
\[ \bbox[#FFCCCC,10px]
{I=\mu R^{2}}
\]
Note: μ is called reduced mass, the problem of two bodies becomes the problem of a single
body spinning around a fixed point. The reduced mass is used in various fields of physics.
advertisement

Fisicaexe - Physics Solved Problems by Elcio Brandani Mondadori is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License .